CM Chapitre1
Télécharger le CM Chapitre1 en pdf
Pages : 1 2 3 4 5 6 7 8 9 10 11 12 13
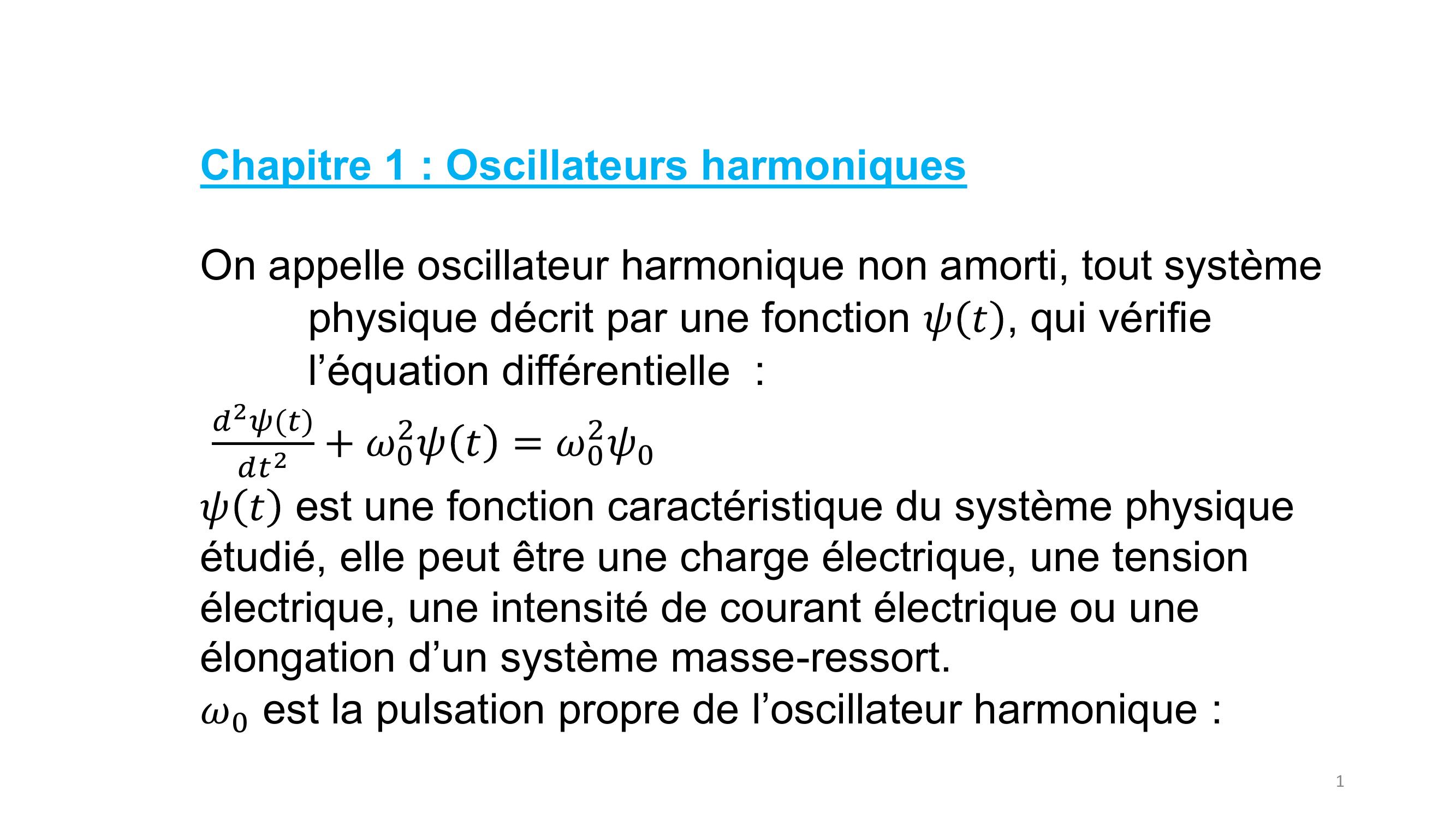
Page 1 : Chapitre 1 : Oscillateurs harmoniquesOn appelle oscillateur harmonique non amorti, tout système physique décrit par une fonction 𝜓𝑡, qui vérifie l’équation différentielle : 𝑑2𝜓𝑡𝑑𝑡2+ 𝜔02𝜓𝑡= 𝜔02𝜓0𝜓𝑡est une fonction caractéristique du système physique étudié, elle peut être une charge électrique, une tension électrique, une intensité de courant électrique ou une élongation d’un système masse-ressort. 𝜔0 est la pulsation propre de l’oscillateur harmonique : 1
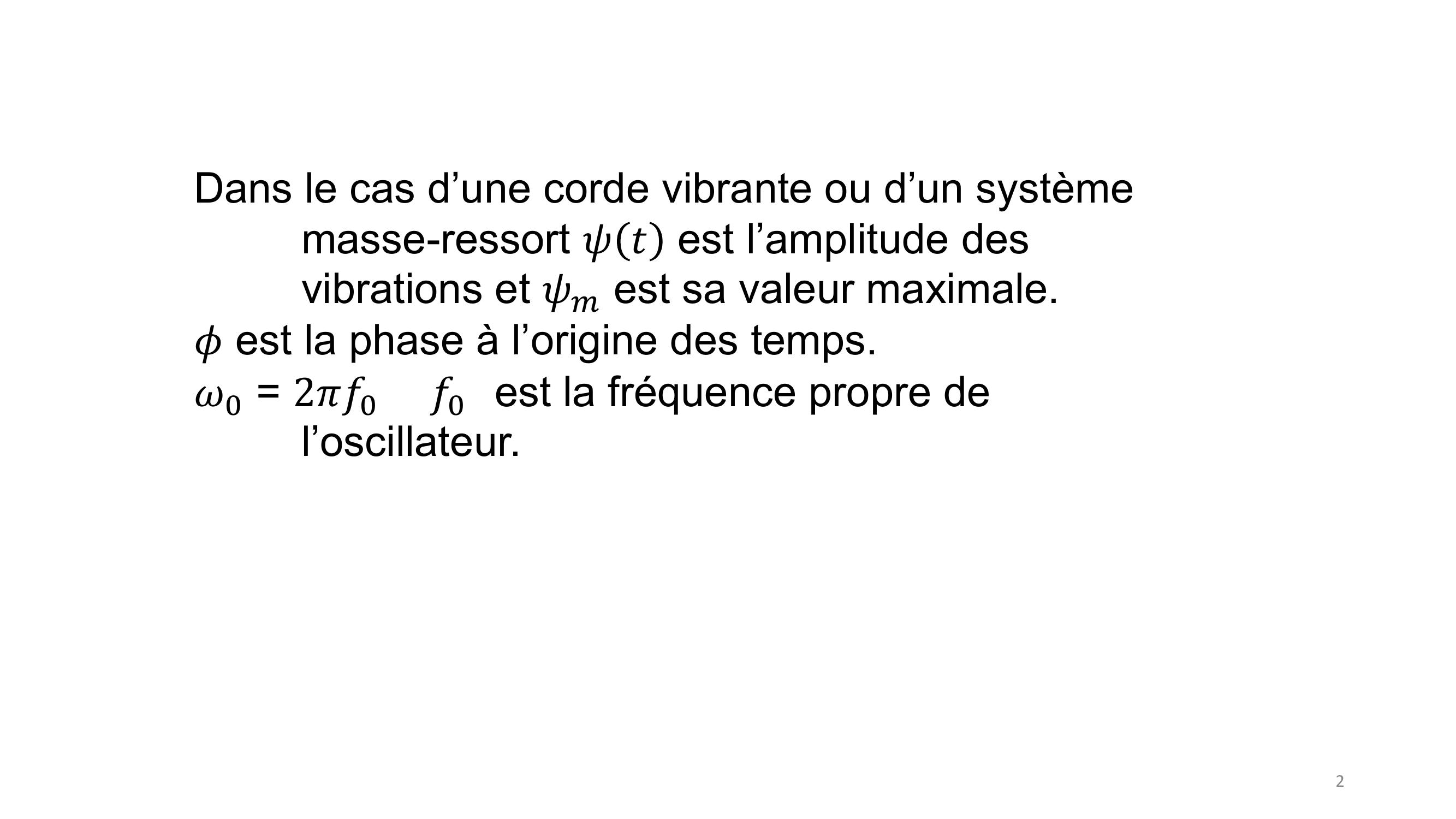
Page 2 : Dans le cas d’une corde vibrante ou d’un système masse-ressort 𝜓𝑡est l’amplitude des vibrations et 𝜓𝑚est sa valeur maximale.𝜙est la phase à l’origine des temps.𝜔0 = 2𝜋𝑓0𝑓0 est la fréquence propre de l’oscillateur.2
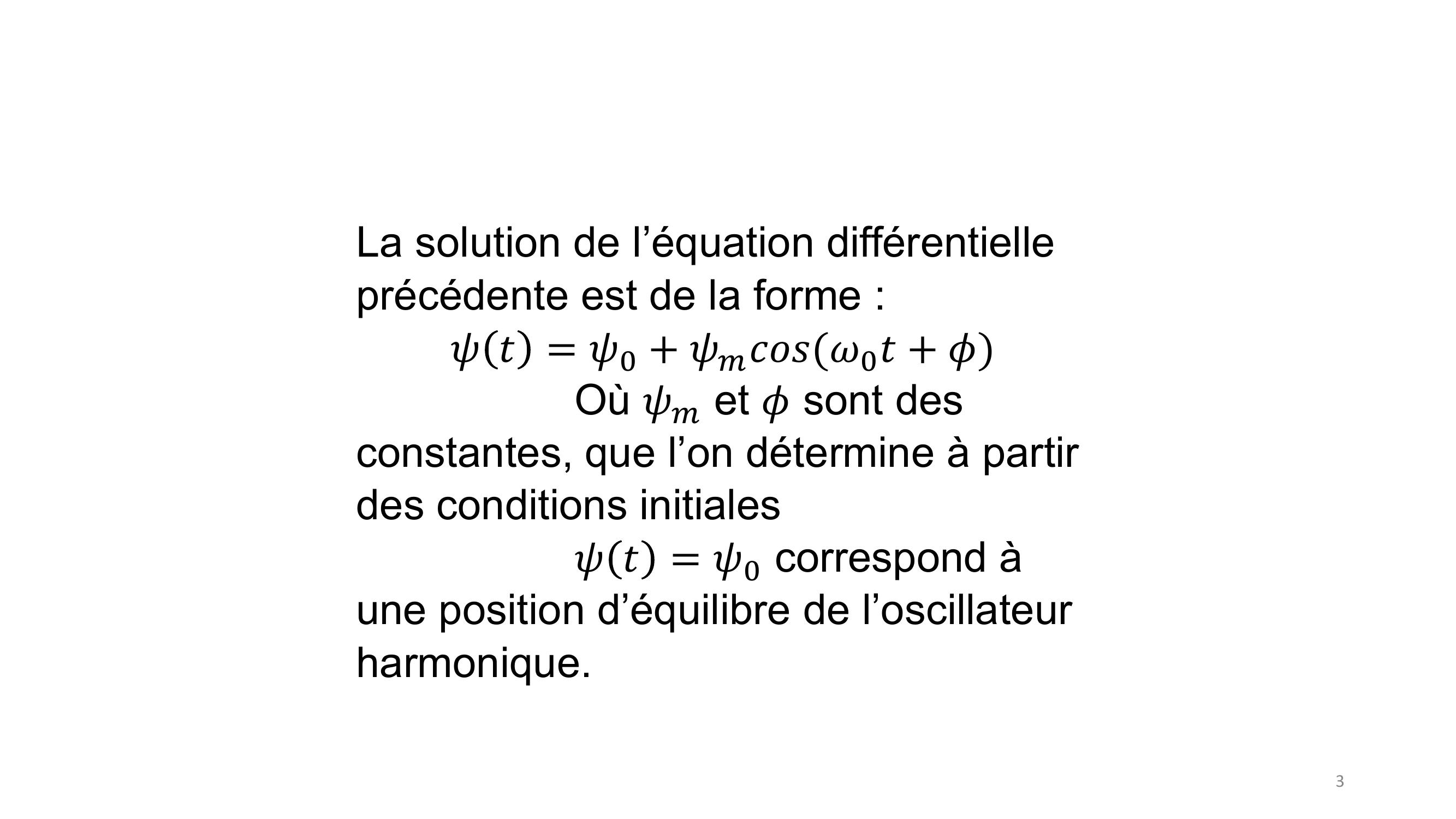
Page 3 : La solution de l’équation différentielle précédente est de la forme :𝜓𝑡= 𝜓0 + 𝜓𝑚𝑐𝑜𝑠𝜔0𝑡+ 𝜙Où 𝜓𝑚et 𝜙sont des constantes, que l’on détermine à partir des conditions initiales 𝜓𝑡= 𝜓0 correspond à une position d’équilibre de l’oscillateur harmonique.3
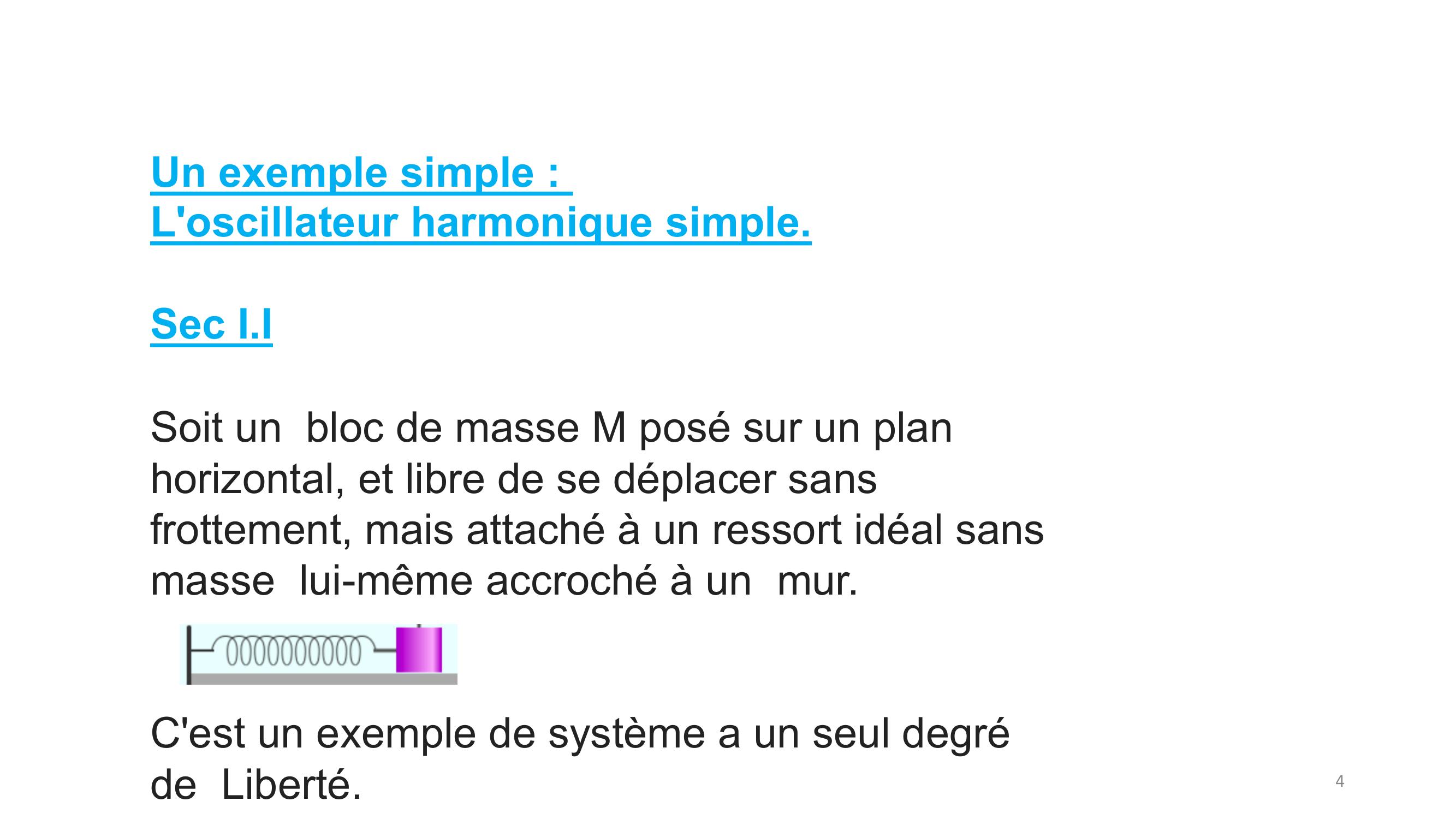
Page 4 : Un exemple simple :L'oscillateur harmonique simple.Sec I.I Soit un bloc de masse M posé sur un plan horizontal, et libre de se déplacer sans frottement, mais attaché à un ressort idéal sans masse lui-même accroché à un mur.C'est un exemple de système a un seul degré de Liberté.4
Page 5 : Rappel:Un ressort idéal et un ressort qui obéit à la loi de Hooke : 𝐸𝑃=12 𝑘𝐿𝐿0 2 =12 𝑘𝑥2avec 𝑥= 𝐿𝐿0Expression dans laquelle 𝑘est la constante de rappel ou de raideur du ressort.𝐿0 est la longueur de a avide du ressort.5
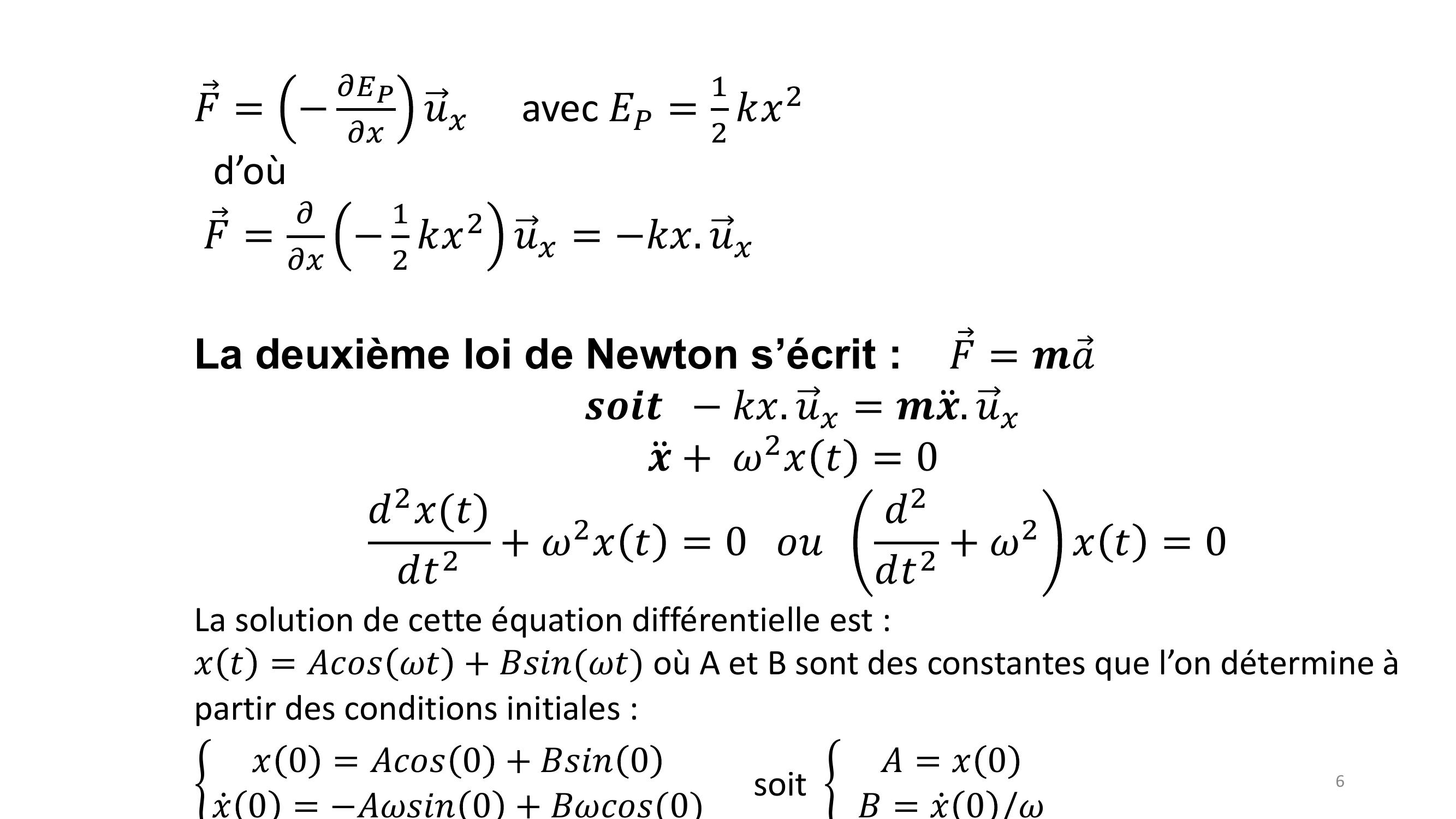
Page 6 : Ԧ𝐹= 𝜕𝐸𝑃𝜕𝑥𝑢𝑥avec 𝐸𝑃=12 𝑘𝑥2d’où Ԧ𝐹=𝜕𝜕𝑥12 𝑘𝑥2 𝑢𝑥= 𝑘𝑥. 𝑢𝑥La deuxième loi de Newton s’écrit :Ԧ𝐹= 𝒎Ԧ𝑎𝒔𝒐𝒊𝒕𝑘𝑥. 𝑢𝑥= 𝒎ሷ𝒙. 𝑢𝑥ሷ𝒙+ 𝜔2𝑥𝑡= 0𝑑2𝑥𝑡𝑑𝑡2+ 𝜔2𝑥𝑡= 0 𝑜𝑢𝑑2𝑑𝑡2 + 𝜔2 𝑥𝑡= 0La solution de cette équation différentielle est :𝑥𝑡= 𝐴𝑐𝑜𝑠𝜔𝑡+ 𝐵𝑠𝑖𝑛𝜔𝑡 où A et B sont des constantes que l’on détermine à partir des conditions initiales :ቊ𝑥0 = 𝐴𝑐𝑜𝑠0 + 𝐵𝑠𝑖𝑛0ሶ𝑥0 = 𝐴𝜔𝑠𝑖𝑛0 + 𝐵𝜔𝑐𝑜𝑠0soit ቊ𝐴= 𝑥0𝐵= ሶ𝑥0 /𝜔6
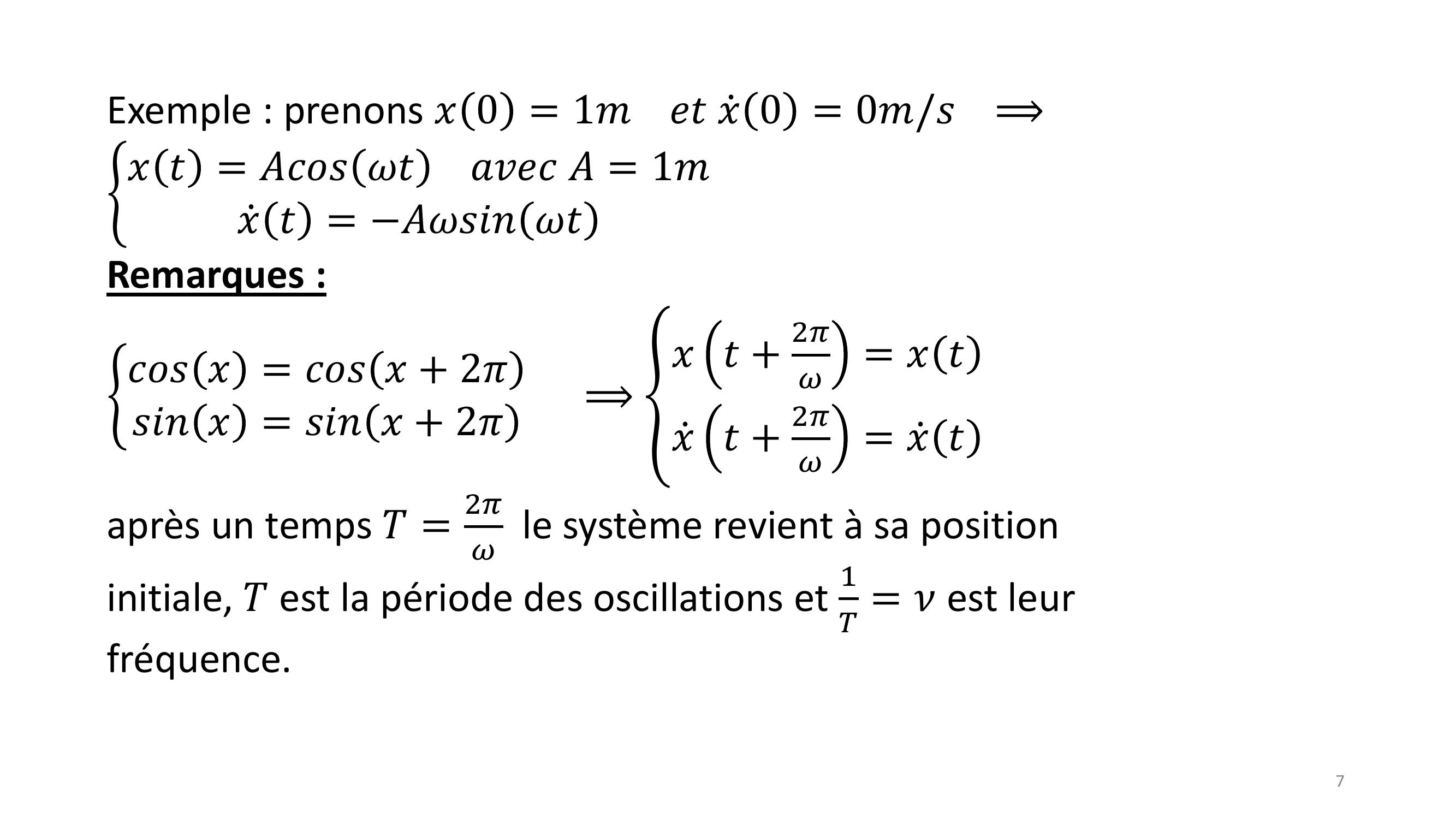
Page 7 : Exemple : prenons 𝑥0 = 1𝑚𝑒𝑡ሶ𝑥0 = 0𝑚/𝑠⟹ቊ𝑥𝑡= 𝐴𝑐𝑜𝑠𝜔𝑡𝑎𝑣𝑒𝑐𝐴= 1𝑚ሶ𝑥𝑡= 𝐴𝜔𝑠𝑖𝑛𝜔𝑡Remarques :ቊ𝑐𝑜𝑠𝑥= 𝑐𝑜𝑠𝑥+ 2𝜋𝑠𝑖𝑛𝑥= 𝑠𝑖𝑛𝑥+ 2𝜋⟹൞𝑥𝑡+2𝜋𝜔= 𝑥𝑡ሶ𝑥𝑡+2𝜋𝜔= ሶ𝑥𝑡après un temps 𝑇=2𝜋𝜔le système revient à sa position initiale, 𝑇est la période des oscillations et 1𝑇= 𝜈est leur fréquence.7
Page 8 : Le système est dit harmonique simple :Harmonique : les solutions sont des sommes de fonctions trigonométriques.Simple : tous les termes de la solution ont la même fréquence.L’équation différentielle du mouvement de la masse M décrit un grand nombre de systèmes physiques.Qu’est ce que ces systèmes ont en commun ?Pourquoi les systèmes harmoniques sont-ils très répandus ?8
Page 9 : 2propriétésa𝜕𝐸𝜕𝑡= 0avec 𝐸=12 𝑀ሶ𝑥2 +12 𝑘𝑥2bLes équations du mouvement sont linéaires :Si ሷ𝒙𝟏+ 𝜔2𝑥1 = 0𝑒𝑡ሷ𝒙𝟐+ 𝜔2𝑥2 = 0 ⟹ሷ𝑥1 + 𝑥2 + 𝜔2 𝑥1 + 𝑥2 = 0Si un système satisfait les conditions a et b, on pourra le réduire à un ensemble d’oscillateurs harmoniques simples et à l’oscillateur hyperbolique : ሷ𝒙𝜔2𝑥𝑡= 09
Page 10 : Section I-2 : Linéarité et superpositionUne équation est linéaire si pour toutes solutions 𝑓𝑒𝑡𝑔, 𝛼𝑓+ 𝛽𝑔est aussi solution pour toute constantes 𝛼𝑒𝑡𝛽.Une équations aux dérivées ordinaires e. d. o. est de la forme :𝑆𝑡+ 𝛼0𝑓𝑡+ 𝛼1ሶ𝑓𝑡+ 𝛼2ሷ𝑓𝑡 + = 010
Page 11 : est dite homogène si 𝑆𝑡= 0, sinon elle est inhomogène.Etudions le cas homogène : sachant que est linéaire, ses solutions engendrent un espace vectoriel.Cherchons une base, c’est-à-dire un ensemble 𝑓𝑖𝑖=1,2… tel que toute solution de est de la forme :𝑖=1𝑛𝛾𝑖𝑓𝑖𝑎𝑣𝑒𝑐𝜕𝛾𝑖𝜕𝑡= 0On propose comme solution de : 𝑓𝑡= 𝑒𝑘𝑡Or 𝑒𝑘= σ𝑛=0𝑘𝑛𝑛!𝑒𝑡𝑆𝑡= 011
Page 12 : devient : 𝛼0𝑒𝑘𝑡+ 𝛼1𝑘𝑒𝑘𝑡+ 𝛼2𝑘2𝑒𝑘𝑡+ 𝛼3𝑘3𝑒𝑘𝑡+ = 0D’où 𝛼0 + 𝛼1𝑘+ 𝛼2𝑘2 + 𝛼3𝑘3 + = 0polynôme d’ordre n en k.Dans le cas de l’oscillateur harmonique simple :𝛼0 = 𝜔2,𝛼1 = 0 𝑒𝑡𝛼2 = 1 𝑑𝑒𝑔𝑟é 2⟹ሷ𝑓+ 𝜔2𝑓= 0 ⟹𝑟2 + 𝜔2 = 0 ⟹𝑟= ±𝑖𝜔⟹les solutions sont de la forme : 𝑓𝑡= 𝐴𝑒𝑖𝜔𝑡+ 𝐵𝑒𝑖𝜔𝑡12
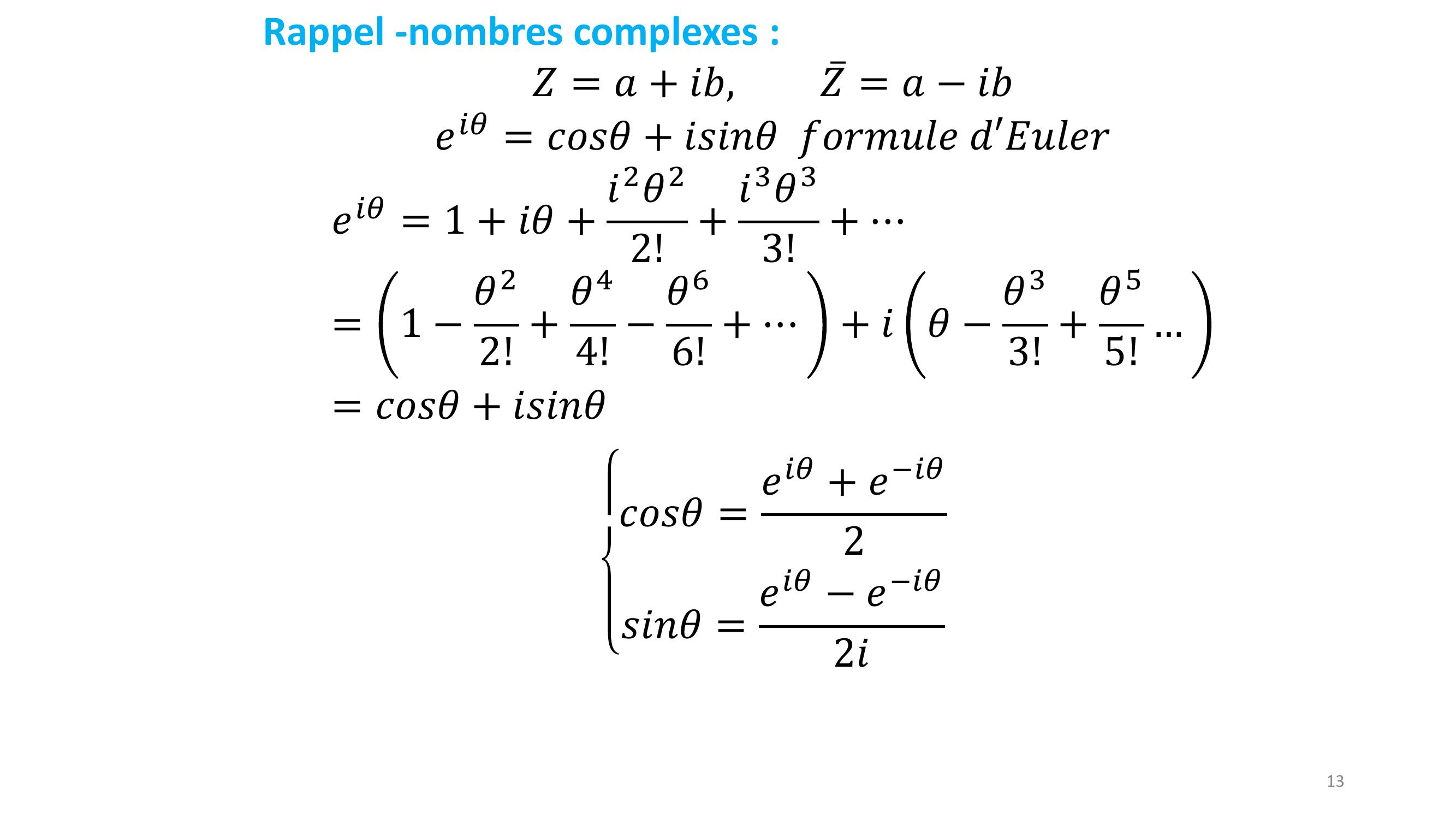
Page 13 : Rappel -nombres complexes :𝑍= 𝑎+ 𝑖𝑏,ҧ𝑍= 𝑎𝑖𝑏𝑒𝑖𝜃= 𝑐𝑜𝑠𝜃+ 𝑖𝑠𝑖𝑛𝜃𝑓𝑜𝑟𝑚𝑢𝑙𝑒𝑑′𝐸𝑢𝑙𝑒𝑟𝑒𝑖𝜃= 1 + 𝑖𝜃+ 𝑖2𝜃22! + 𝑖3𝜃33! + =1 𝜃22! + 𝜃44! 𝜃66! + + 𝑖𝜃𝜃33! + 𝜃55! …= 𝑐𝑜𝑠𝜃+ 𝑖𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃= 𝑒𝑖𝜃+ 𝑒𝑖𝜃2𝑠𝑖𝑛𝜃= 𝑒𝑖𝜃𝑒𝑖𝜃2𝑖13