Cours
Pages : 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180
Page 1 : CPI1AlgèbreCoursjean-michel.masereel@eisti.eu
Page 2 :

Page 3 : La vie n’est bonne qu’à deux choses :Découvrir les mathématiques et enseigner les mathématiques.Siméon Denis Poisson 1781 - 1840

Page 4 :

Page 5 : SommaireI.S111.Logique et raisonnement31.1.Rudiments de logique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31.2.Différents types de raisonnements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81.3.Propriétés de N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112.Ensembles172.1.Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172.2.Opérations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .192.3.Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213.Relations binaires253.1.Vocabulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .253.2.Relations d’équivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .263.3.Relations d’ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .274.Applications314.1.Fondamentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314.2.Composition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .324.3.Fonction indicatrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.4.Image directe et réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .344.5.Injections, Surjections, Bijections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .355.Nombres complexes395.1.Rappels de Terminale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .395.2.Exponentielle complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .405.3.Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .456.Polynômes536.1.Polynômes à une indéterminée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .536.2.Dérivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .566.3.Arithmétique dans KX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .576.4.Racines d’un polynôme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .596.5.Décomposition en facteurs irréductibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .616.6.Somme et produit des racines d’un polynôme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .637.Fractions Rationnelles657.1.Ensemble des fractions rationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .657.2.Décomposition en éléments simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68II.S2758.Groupes778.1.Lois de composition interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .778.2.Groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .818.3.Morphismes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84iii
Page 6 : CPI12019/2020Algèbre9.Systèmes linéaires879.1.Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .879.2.Systèmes équivalents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .899.3.Algorithme de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .919.4.Résolution d’un système linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9510. Espaces vectoriels10110.1. Espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10110.2. Familles de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10910.3. Espaces vectoriels de dimension finie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11211. Applications linéaires11711.1. Définitions et propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11711.2. Image, Noyau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11811.3. Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12011.4. Applications linéaires en dimension finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12312. Matrices12712.1. Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12712.2. Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13412.3. Matrices inversibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13513. Déterminants14113.1. Déterminant d’une matrice carré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14213.2. Déterminant d’une famille de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14813.3. Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14914. Représentation matricielle des applications linéaires15114.1. Matrice d’une application linéaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15114.2. Changements de bases, équivalence et similitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . 155ivSOMMAIRE
Page 7 : Première partieS11
Page 8 :

Page 9 : 1. Logique et raisonnementTous les hommes sont mortels, or Socrateest un homme donc Socrate est mortel.Aristote.Autre syllogisme : tous les chats sontmortels. Socrate est mortel. Donc Socrateest un chat.Le logicien, dans Le rhinocéros, E.Ionesco.Ce chapitre a pour objectif de vous apprendre à raisonner correctement, c’est-à-dire pas comme le logicien deIonesco. Vous utilisez déjà, peut-être sans le savoir, le syllogisme formalisé par Aristote. En effet, vous avez déjàl’habitude de démontrer qu’une implication « P ⇒Q » est vraie, puis de vérifier que la proposition P est vraie pouren déduire que la proposition Q est vraie.Nous allons voir dans ce chapitre d’autres types de raisonnements.1.1. Rudiments de logique1.1.1. Première définitionDéfinition 1.1 Proposition. On appelle proposition un énoncé mathématiques qui peut être soit vrai noté Vou 1 soit faux noté F ou 0.Les énoncés ne sont pas forcément mathématiques. Durant votre parcours à l’EISTI, nous ne nous intéresseronsqu’aux énoncés mathématiques et physique, même si, pour expliquer un concept, nous pourrons utiliser des exemplesissus d’autres disciplines.Exemple 1.1.— « 1+1=2 » est une proposition vraie.— « L’entier 2014 est impair » est une proposition fausse.— « Tous les élèves de la classe auront leur diplôme d’ici 5 ans ». Nous ne pouvons pas encore déterminer sicet énoncé est vrai ou faux, il reste néanmoins soit vrai soit faux, c’est donc bien une proposition.— « Quelle heure est-il? » est un énoncé, mais il n’a pas de valeurs de vérité : ce n’est ni vrai ni faux. Ce n’estdonc pas une proposition.3
Page 10 : CPI12019/2020Algèbre1.1.2. OpérationsÀ partir d’une ou plusieurs propositions, il est possible d’en créer de nouvelles.Définition 1.2 Négation. Soit une proposition P. On définit la négation de P que l’on note « ¬P » ou « P » ouencore « nonP », comme la proposition qui est vraie lorsque P est fausse et est fausse lorsque P est vraie.Remarque 1.1. Les deux propositions P et P ne peuvent pas être vraies en même temps.Exemple 1.2. Soit P la proposition « Il fait plus de 20 ◦C aujourd’hui ». La négation de P est « Il fait moins de20 ◦C aujourd’hui ». Il ne peut pas faire à la fois plus de 20 ◦C et moins de 20 ◦C.Définition 1.3 Conjonction. Soit deux propositions P et Q. On définit la conjonction de P et Q que l’on note« PQ » ou « P et Q », comme la proposition qui est vraie lorsque P et Q sont toutes les deux vraies, et fausselorsque au moins l’une des deux propositions P ou Q est fausse.Exemple 1.3. Soit P la proposition « Il fait plus de 20 ◦C aujourd’hui » et Q la proposition « Il va pleuvoirdemain ». La conjonction de P et Q est « Il fait plus de 20 ◦C aujourd’hui et il va pleuvoir demain ».Définition 1.4 Disjonction. Soit deux propositions P et Q. On définit la disjonction de P et Q que l’on note« PQ » ou « P ou Q », comme la proposition qui est vraie lorsque au moins l’une des deux propositions P ouQ est vraie, et fausse lorsque les deux propositions P et Q sont fausses.Exemple 1.4. Soit P la proposition « Il fait plus de 20 ◦C aujourd’hui » et Q la proposition « Il va pleuvoirdemain ». La disjonction de P et Q est « Il fait plus de 20 ◦C aujourd’hui ou il va pleuvoir demain ».Remarque 1.2. Attention, le « ou » mathématiques n’a pas exactement le même sens que le « ou » français. En effet,le « ou » mathématique est non exclusif, c’est-à-dire que l’on n’interdit pas à P et Q d’être vrais tous les deux. Enfrançais, le « ou » est plutôt considéré comme exclusif. Lorsque dans un restaurant par exemple, il est écrit sur la carte« fromage ou dessert », il ne viendrait à l’idée de personne sauf peut-être d’un prof de maths de commander les deux.Dans les définitions précédentes, il n’y avait pas de lien entre les deux propositions P et Q. Nous allons voirmaintenant des opérations qui sous tendent un lien entre P et Q.Définition 1.5 Implication. Soit P et Q deux propositions. On définit la proposition P implique Q, notée P ⇒Q,comme la proposition qui est vraie si P est fausse ou si P et Q sont toutes les deux vraies; et qui est fausse si Pest vraie et Q fausse.Exemple 1.5.— Soit P la proposition « je ne me suis pas réveillé ce matin » et Q la proposition « je suis enretard à l’école ». La proposition P ⇒Q est vraie. Remarquez que la proposition Q ⇒P est fausse.— La proposition 1 = 2 ⇒π = e est-elle vraie ou fausse?41. Logique et raisonnement
Page 11 : AlgèbreCPI12019/2020Définition 1.6 Réciproque. Soit P et Q deux propositions. La réciproque de la proposition « P ⇒Q » est laproposition « Q ⇒P »Tout comme nous l’avons vu sur l’exemple précédent, connaître la valeur de vérité de P ⇒Q ne donne aucuneinformation sur la valeur de vérité de Q ⇒P.Définition 1.7 Équivalence. Soit P et Q deux propositions. On définit la proposition P équivalent à Q, notéeP ⇔Q, comme la proposition qui est vraie si P et Q sont vraies ou si P et Q sont fausses; et qui est fausse si l’uneest fausse et l’autre vraie.Remarque 1.3. On démontrera en TD que la proposition P ⇔Q a la même valeur de vérité que P ⇒Q et Q ⇒P. Cela donne une certaine cohérence dans les notations ⇒et ⇔.Exemple 1.6.— Il semble difficile de trouver un exemple de la vie courante. Et vous? Réussirez-vous à enproposer une?— Soit a et b deux réels. L’équivalence a = b ⇔ea = eb est vraie.— La proposition 1 = 2 ⇔32 = 9 est elle vraie ou fausse?Attention de ne pas confondre l’implication et l’équivalence, ce que vous faites souvent. Lorsque l’on rédige unedémonstration il est plus naturel de raisonner en implication. Or on a plus souvent besoin d’avoir des équivalences.Lorsque l’on écrit une équivalence, il faut donc toujours penser à vérifier que la réciproque est bien vraie.Définition 1.8 Condition nécessaire/suffisante.— Soit P ⇒Q une implication. On dit que P est une condition suffisante à Q, et que Q est une conditionnécessaire à P.— Soit P ⇔Q une équivalence. On dit que P est une condition nécessaire et suffisante à Q ou que Q est unecondition nécessaire et suffisante à P.Remarque 1.4. Supposons que P ⇒Q.— Le fait que P soit vraie suffit à ce que Q soit vraie.— Par contre le fait que P soit vraie n’est pas nécessaire à Q puisque Q peut très bien être vraie alors que P ne l’estpas.— Lorsque P est vraie, Q est nécessairement vraie aussi.— Le fait que Q soit vraie ne suffit pas à ce que P soit vraie puisque, comme nous l’avons déjà signalé, Q peut trèsbien être vraie alors que P ne l’est pas.Remarque 1.5. Lorsque P ⇔Q chaque proposition est à la fois nécessaire et suffisante à l’autre proposition.1. Logique et raisonnement5
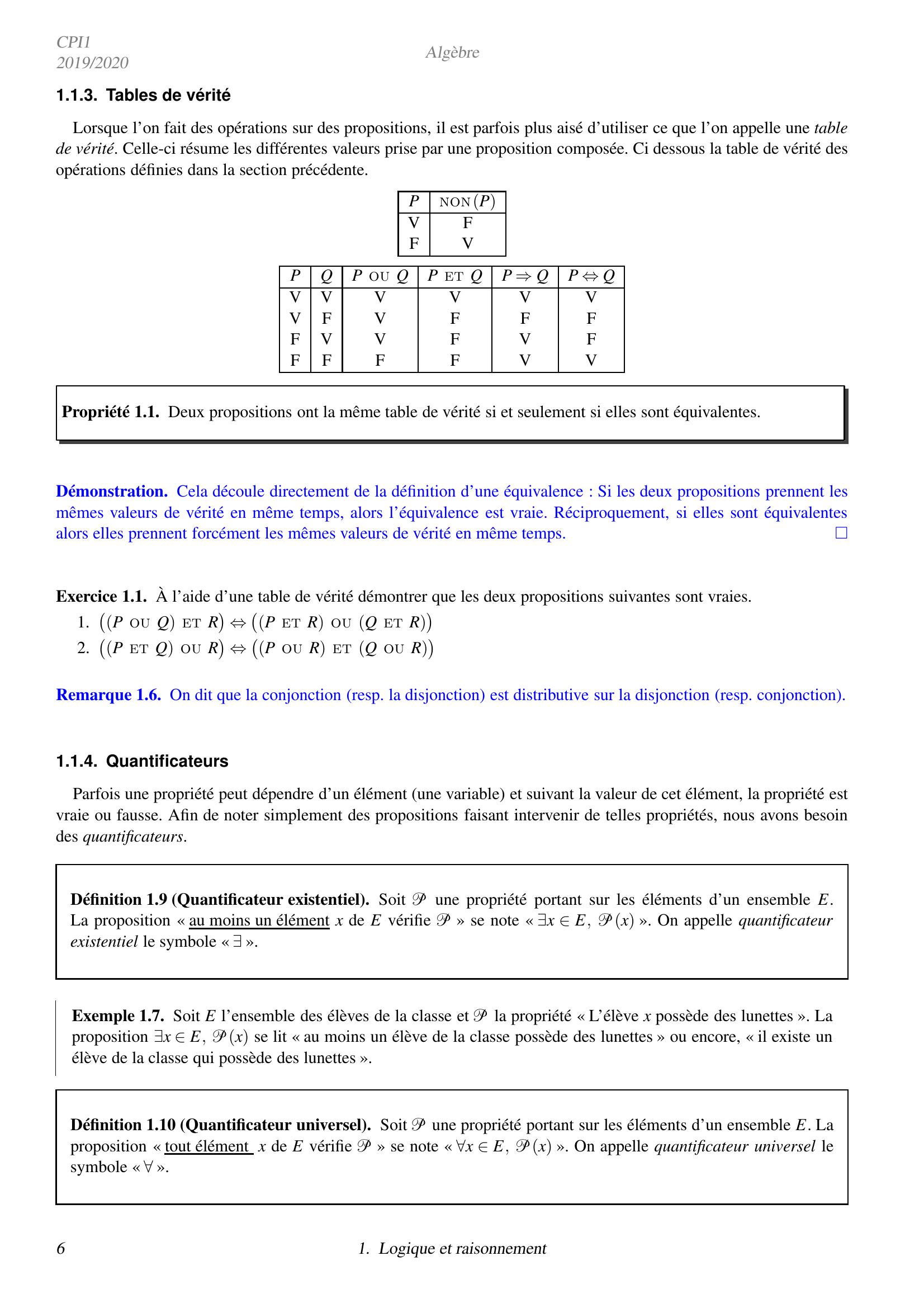
Page 12 : CPI12019/2020Algèbre1.1.3. Tables de véritéLorsque l’on fait des opérations sur des propositions, il est parfois plus aisé d’utiliser ce que l’on appelle une tablede vérité. Celle-ci résume les différentes valeurs prise par une proposition composée. Ci dessous la table de vérité desopérations définies dans la section précédente.PnonPVFFVPQP ou QP et QP ⇒QP ⇔QVVVVVVVFVFFFFVVFVFFFFFVVPropriété 1.1. Deux propositions ont la même table de vérité si et seulement si elles sont équivalentes.Démonstration. Cela découle directement de la définition d’une équivalence : Si les deux propositions prennent lesmêmes valeurs de vérité en même temps, alors l’équivalence est vraie. Réciproquement, si elles sont équivalentesalors elles prennent forcément les mêmes valeurs de vérité en même temps.□Exercice 1.1. À l’aide d’une table de vérité démontrer que les deux propositions suivantes sont vraies.1.P ou Q et R⇔P et R ou Q et R2.P et Q ou R⇔P ou R et Q ou RRemarque 1.6. On dit que la conjonction resp. la disjonction est distributive sur la disjonction resp. conjonction.1.1.4. QuantificateursParfois une propriété peut dépendre d’un élément une variable et suivant la valeur de cet élément, la propriété estvraie ou fausse. Afin de noter simplement des propositions faisant intervenir de telles propriétés, nous avons besoindes quantificateurs.Définition 1.9 Quantificateur existentiel. Soit P une propriété portant sur les éléments d’un ensemble E.La proposition « au moins un élément x de E vérifie P » se note « x E, Px ». On appelle quantificateurexistentiel le symbole « ».Exemple 1.7. Soit E l’ensemble des élèves de la classe et P la propriété « L’élève x possède des lunettes ». Laproposition x E, Px se lit « au moins un élève de la classe possède des lunettes » ou encore, « il existe unélève de la classe qui possède des lunettes ».Définition 1.10 Quantificateur universel. Soit P une propriété portant sur les éléments d’un ensemble E. Laproposition « tout élément x de E vérifie P » se note « x E, Px ». On appelle quantificateur universel lesymbole « ».61. Logique et raisonnement
Page 13 : AlgèbreCPI12019/2020Exemple 1.8. Soit E l’ensemble des élèves de la classe et P la propriété « L’élève x possède des lunettes ». Laproposition x E, Px se lit « tout élève de la classe possède des lunettes ».Définition 1.11. Soit P unepropriétéportantsurles élémentsd’unensembleE. La proposition« un et un seul élément x de E vérifie P » se note « !x E, Px ».Exemple 1.9. Soit E l’ensemble des élèves de la classe et P la propriété « L’élève x possède des lunettes ». Laproposition !x E, Px se lit « il existe un unique élève de la classe qui possède des lunettes ».Il est possible d’utiliser plusieurs quantificateurs dans une même propositions. Il faut alors faire très attention àl’ordre dans lequel ils sont utilisés. Comparez le sens des deux phrases suivantes :— Pour toute serrure, il existe une clef qui l’ouvre x, y, Px,y.— Il existe une clef qui ouvre toutes les serrures y, x, Px,y.1.1.5. NégationsNous avons vu la négation d’une simple proposition, mais qu’en est-il de la négation d’une proposition complexefaisant intervenir des opérations et des quantificateurs?Propriété 1.2. Soit P et Q deux propositions. On a alors— nonnonP ⇔P— nonP et Q ⇔nonP ou nonQPremière loi de De Morgan— nonP ou Q ⇔nonP et nonQDeuxième loi de De Morgan— nonP ⇒Q ⇔P et nonQDémonstration. La démonstration se fait très simplement avec les tables de vérités.□Propriété 1.3. Soit P une propriété portant sur les éléments d’un ensemble E. On a alors— nonx E, Px est x E, nonPx.— nonx E, Px est x E, nonPx.Remarque 1.7. Il suffit de retenir que pour écrire la négation d’une proposition contenant des quantificateurs, il fautremplacer les par des et réciproquement, et prendre la négation de la proposition.Exemple 1.10. La négation de « tous les élèves ont des lunettes » n’est pas « aucun élève n’a de lunette » mais« il existe un élève qui n’a pas de lunettes ».1. Logique et raisonnement7
Page 14 : CPI12019/2020Algèbre1.2. Différents types de raisonnements1.2.1. Raisonnement par contrapositionDéfinition 1.12 Contraposée. Soit P et Q deux propositions. La contraposée de la proposition « P ⇒Q » estla proposition « nonQ ⇒nonP »Propriété 1.4. Une implication et sa contraposée sont équivalentes. C’est-à-dire queP ⇒Q ⇔nonQ ⇒nonPDémonstration. Vous avez déjà démontré cela à l’aide des tables de vérité lors de la question 15 de l’exercice 1 dupolycopié de TD du chapitre 1 « Logique et raisonnement ». Nous allons cependant la redémontrer en utilisant lespropriétés de logique que l’on connaît déjà.P ⇒Q ⇔nonP ou Q⇔Q ou nonP⇔nonnonQ ou nonP⇔nonQ ⇒nonPRemarque 1.8.— Attention! Ne confondez pas contraposée et réciproque. Si une implication est vraie, sa contraposée est toujoursvraie, par contre sa réciproque ne l’est pas forcément.— Ainsi, lorsque l’on doit démontrer une implication du type P ⇒Q, on peut soit la démontrer directement, soitdémontrer sa contraposée : on suppose que Q est faux et on démontre que P est faux aussi.Exemple 1.11. Afin de démontrer qu’un triangle dont on connaît les longueurs des côtés n’est pas rectangle,on utilise la contraposée du théorème de Pythagore. En effet, le théorème de Pythagore « Si le triangle ABC estrectangle en A, alors BC2 = AB2 +AC2 » est équivalent à sa contraposée « Si BC2 ̸= AB2 +AC2 alors le triangleABC n’est pas rectangle en A »Remarque 1.9. Notez bien qu’un raisonnement par contraposé s’applique exclusivement à des implications, alorsqu’un raisonnement par l’absurde peut s’appliquer à différents types de propriétés.1.2.2. Raisonnement par l’absurdeOn veut montrer une proposition P. Pour cela on suppose que cette proposition est fausse, et on tente d’en déduireune absurdité. Cette absurdité peut être soit une proposition Q qui est clairement fausse, soit une proposition de typeQ = R et nonR qui est clairement fausse aussi.Intuitivement on voit bien que si l’on aboutit à une absurdité, c’est que l’hypothèse de départ P fausse était fausseet donc que P est vraie. Cela se démontre aussi en utilisant les propriétés de logique :Nous avons montré que nonP ⇒Q, or par contraposition cela revient à dire quenonQ ⇒nonnonP ou encore nonQ ⇒P. Mais puisque Q est fausse, nonQ est vraie et donc Paussi.81. Logique et raisonnement
Page 15 : AlgèbreCPI12019/2020Exemple 1.12. Un exemple fréquent consiste à vouloir démontrer une proposition P de type A ⇒B par l’ab-surde. On part donc de nonP, c’est-à-dire de A et nonB. Par divers raisonnement et calculs on aboutit àune absurdité. En général cette absurdité est la proposition nonA, qui est effectivement absurde puisque l’onest parti de A.Remarque 1.10. Attention!! L’exemple fréquent 1.12 que l’on vient de voir conduit aussi malheureusement à uneerreur tout aussi fréquente : confondre le raisonnement par contraposition et le raisonnement par l’absurde. Beaucoupde personnes pensent démontrer A ⇒B par l’absurde en écrivant des choses du type :Supposons que l’on a A et pas B. Puisque l’on n’a pas B . . ....Et donc on n’a pas A. Ce qui est absurde puisque l’on a supposé que l’on avait A.Si à aucun moment de la démonstration dans la partie en pointillée, la proposition A n’est utilisée, alors ce raison-nement est tout bêtement un raisonnement par contraposition : nonB ⇒nonA.1.2.3. Raisonnement par analyse-synthèseNous devons parfois démontrer des choses trop complexes pour être attaquées de front. Il nous faut d’abord ana-lyser le problème afin de le réduire. C’est le cas lorsque l’on cherche à montrer l’existence d’un objet un nombrepar exemple devant satisfaire certaines conditions. Une analyse du problème permet de réduire le nombre de candi-dats possibles. La synthèse consiste alors à déterminer parmi les candidats ceux qui sont effectivement solutions duproblème.Le schéma d’un raisonnement par analyse-synthèse est le suivant :Analyse : On suppose que l’objet existe et on essaie de trouver des conditions nécessaires que doit vérifier cet objet.Ce faisant, on prouve que si l’objet existe, alors il est nécessairement dans un ensemble restreint.Synthèse : On considère les objets identifiés dans la partie analyse, et on vérifie que certains ont bien les propriétésvoulues ceci assure l’existence.Remarque 1.11. Si l’analyse n’exhibe qu’un seul candidat possible, on parle alors d’unicité si existence.Exemple 1.13. Le BN géantCommençons par rendre à César ce qui appartient à César. L’exemple qui suit est tiré de cette page : http://la-bnbox.fr/c541-Le-raisonnement-par-analyse-synthese.cahierUn jour, on vous demande de prouver l’existence d’un BN au chocolat géant vivant!À première vue, cela semble assez difficile à faire. . . Et vous n’avez aucune idée de la manière de procéder.Alors procédons par Analyse-Synthèse.Analyse : Supposons qu’il existe un BN au chocolat géant vivant quelque part dans le monde.— Si un BN de ce genre existe, il est évident qu’il vivra nécessairement loin de l’eau, parce qu’un BNdans l’eau devient tout mou et se dissous. . .— Si ce type de BN existe, il se trouvera nécessairement loin des régions chaudes, sinon son chocolatfondrait et il disparaitrait.— Il sera aussi nécessairement loin des régions très froides, pour ne pas geler. Je laisse l’auteur res-ponsable de cette affirmation, personnellement je pense que rien ne prouve qu’il ne survivrait pas àdes régions très froides.Ces conditions nécessaires réduisent déjà notre champ de recherche. On sait que maintenant, le seul endroitoù on peut trouver un BN de ce type, c’est en France. Là encore je laisse l’auteur responsable de cetteconclusion un peu hâtive. . .Mais la France c’est toujours assez grand. On va donc chercher d’autres conditions nécessaires encore plusrestrictives.1. Logique et raisonnement9
Page 16 : CPI12019/2020AlgèbreUn grand BN comme ça, ça a besoin de beaucoup de chocolat pour tenir ensemble. . . Il doit donc nécessairementvivre près d’une chocolaterie, ou d’une biscuiterie.De plus, les BN sont créés à Nantes. En admettant le fait qu’un grand gaillard comme lui habite encoreprès de chez ses parents, il habite nécessairement près de Nantes.Ce qui nous amène directement à la conclusion que le BN géant habite dans la biscuiterie BN. Encore uneconclusion bien hâtive, comment de « près de Nantes » on aboutit à « dans la biscuiterie BN »? Est-ce laseule biscuiterie de la région? Passons, passons, c’est juste pour l’exemple. . .Synthèse : Nous devons vérifier notre conclusion, c’est-à-dire que nous devons prendre le premier avion ou lepremier TGV ou tout autre moyen de transport, même si ce n’est pas le premier pour Nantes et nousrendre à la biscuiterie pour vérifier que le BN géant s’y trouve.— Soit on le trouve, et on a bien prouvé qu’il existe.— Soit on ne le trouve pas, et on a prouvé qu’il n’existe pas, puisqu’il n’est pas à l’endroit où il devaitnécessairement être.Exemple 1.14. Soit xn la suite réelle définie par récurrence par x0 = 1 et xn+1 =53xn. Déterminer un majorantde xn.Le problème semble bien complexe. Une analyse s’impose!Analyse : Nous ne voyons pas du tout à quoi pourrait ressembler un majorant de xn. Supposons donc que noussoyons en présence d’un tel majorant et étudions les propriétés qu’il possède nécessairement.Tout d’abord, si un majorant existe, alors l’ensemble des majorants possède un plus petit élément c’estune propriété qui est hors programme. Notons Mmin ce plus petit des majorants.Puisque Mmin est un majorant, nous pouvons affirmer que pour tout n N, xn Mmin. En multipliant par3 l’inégalité, nous avons 3xn 3Mmin. La fonction « racine-5e » étant croissante admis, nous pouvonsprendre la racine-5e de l’inégalité pour obtenir53xn 53Mmin, c’est-à-dire :xn+1 5p3MminCeci étant vrai pour tout n N, on en conclut que pour tout n N, xn 53Mmin.Ainsi53Mmin est un majorant, il est donc plus grand que le plus petit des majorants :Mmin 5p3MminÉtant donné que u0 = 1, nous pouvons affirmer que tous les majorants sont supérieurs ou égaux à 1, enparticulier Mmin 0. Ainsi l’inégalité précédente est équivalente àM5min 3Mmin ⇔M4min 3 ⇔Mmin 43On peut donc conclure que si des majorants existent, alors43 en est un ce n’est pas forcément Mmin.Synthèse : On vérifie que43 est bien un majorant en faisant par exemple une démonstration par récurrence. Àvos stylos!Vous voyez que sans le raisonnement par analyse-synthèse vous auriez été obligé de vous reposer, soit sur uneindication de l’énoncé vous demandant de montrer que43 était un majorant, soit sur votre calculatrice pourconjecturer que 2 faisait un bon candidat.101. Logique et raisonnement

Page 17 : AlgèbreCPI12019/20201.3. Propriétés de NVous connaissez déjà très bien N, l’addition, la multiplication sur N, ainsi que les relations , , et . Nousn’allons donc pas revenir dessus.1.3.1. Définitions généralesCommençons par des définitions qui ne sont pas propres à N.Définition 1.13 Plus grand/petit élément. Soit E un ensemble possédant une relation « inférieur ou égal à »,notée « », permettant de comparer les éléments entre eux. On appelle plus grand resp. petit élément de E,un élément x de E s’il existe tel que pour tout élément y de E, y est inférieur resp. supérieur ou égal à x. Ennotation mathématiques, cela donne « y E, y x » resp. « y E, x y ».Remarque 1.12. Pourquoi préciser «s’il existe »? Tout simplement parce que l’ensemble E ne possède pas forcémentde plus grand élément. Considérez par exemple E = 0;1. Le nombre 1 est effectivement plus grand que tous leséléments de E, mais il n’appartient pas à E.Définition 1.14 Ensemble des majorants/Minorants. Soit E et F deux ensembles possédant une relation« inférieur ou égal à », notée « », permettant de comparer les éléments entre eux et tels que E F. On ap-pelle ensemble des majorants resp. minorants de E dans F, tous les éléments de F qui sont supérieurs resp.inférieurs à tous les éléments de E. Un tel élément est simplement appelé majorant resp. minorant de E. Ennotation mathématiques, dire que x est un majorant resp. minorant de E, revient à dire « y E, y x » resp.« y E, x y ».Si l’ensemble des majorants resp. minorants est non vide, on dit que E est une partie majorée resp. minoréede F.Remarque 1.13. Comme le laisse entrevoir la définition, l’ensemble des majorants ou minorants peut être vide.Prenez par exemple E = 0;+. Il n’existe aucun élément réel qui soit supérieur à tous les éléments de E.Remarquez qu’un majorant ou un minorant n’appartient pas forcément à l’ensemble E.Exemple 1.15. Si on reprend l’ensemble évoqué plus haut, E = 0;1 :— E ne possède pas de plus grand élément.— 0 est le plus petit élément de E.— ;0 est l’ensemble des minorants de E remarquez que 0 en fait parti.— 1;+ est l’ensemble des majorants de E.1.3.2. Parties de NNous nous intéressons maintenant plus particulièrement à N et à ses sous-parties.Axiome 1.1. Toute partie non vide de N possède un unique plus petit élément.1. Logique et raisonnement11

Page 18 : CPI12019/2020AlgèbreDémonstration. Un axiome, par définition, n’a pas besoin de démonstration. Cependant, l’unicité du plus petit élé-ment ne fait en réalité pas partie de l’axiome. Nous allons donc le démontrer.Pour démontrer l’unicité d’un objet, la méthode classique consiste à supposer qu’il en existe deux et à démontrerqu’ils sont nécessairement égaux.Supposons donc que l’on a A une partie non vide de N. Puisque A est non vide, elle possède au moins un élémenta. Si A ne possède qu’un seul élément, la démonstration s’arrête là! On suppose donc de plus que A possède au moinsdeux éléments et qu’ils sont tout deux un « plus petit élément de A ». Notons les a et b. Puisque a est un plus petitélément de A et que b A, nous avons a b. De même nous avons nécessairement b a. Cela revient à dire quea = b et que le plus petit élément est forcément unique.□Propriété 1.5. Toute partie majorée non vide de N possède un unique plus grand élément.Démonstration. La démonstration de l’unicité du plus grand élément est la même que pour le plus petit élément.Focalisons nous donc sur l’existence.Soit A une partie majorée non vide de N. Puisque A est majorée, elle possède des majorants!, notons B l’ensemblede ses majorants, qui est non vide. D’après l’axiome 1.1, B admet un plus petit élément que l’on note m. Montronsque m appartient à A. Nous allons faire un raisonnement par l’absurde.Supposons que m n’appartient pas à A et montrons que l’on aboutit à une absurdité contradiction. Comme m est unmajorant de A, on ax A, x mOr x appartient à A et m n’appartient pas à A, ils sont donc distincts et par conséquentx A, x mCela impose que m 1 sinon on aurait : x A, x 0, ce qui est impossible puisque nous sommes dans N et que Aest non vide et que m1 appartient à N. Nous avons doncx A, x m1C’est la définition d’un majorant, donc m1 est un majorant de A et appartient à B. Or m était censé être le plus petitélément de B. Nous arrivons ainsi à une absurdité et pouvons conclure que notre supposition d’origine m /A étaitfausse. D’où m A, m majore A, c’est bien le plus grand élément de A.Nous avons donc montré l’existence d’un plus grand élément de A.□1.3.3. Raisonnement par récurrenceVous avez déjà vu le raisonnement par récurrence au lycée. Nous allons le démontrer.Théorème 1.1 Principe de récurrence. Soit A une partie de N telle que,1. A contient 0.2. Si A contient un entier n, alors A contient n+1.Alors A = N.Démonstration. Nous devons montrer que A = N. La méthode classique consiste à faire une double inclusion. Cen’est pas ce que nous allons faire ici. . . Nous allons montrer que N\A N privé de A est l’ensemble vide par unraisonnement par l’absurde et en conclure que A = N.121. Logique et raisonnement
Page 19 : AlgèbreCPI12019/2020Soit une partie A de N vérifiant les conditions de la propriété. Supposons que N\A est non vide. En vertu del’axiome 1.1, il possède un plus petit élément que nous noterons m. Par définition, m n’appartient pas à A. Or d’aprèsla condition 1, 0 appartient à A, donc nécessairement, m est différent de 0 et m 1 N. Un élément de N appartientsoit à A soit à N\A, de plus m 1 ne peut pas appartenir à N\A, sinon m ne serait pas le plus petit élément. D’oùm 1 appartient à A. D’après la condition 2 nous avons nécessairement m 1+ 1 = m qui appartient à A. Or m nepeut appartenir à la fois à A et à N\A. D’où l’absurdité et N\A est l’ensemble vide. Nous en concluons que A = N. □Remarque 1.14. L’énoncé du théorème 1.1 peut-être légèrement modifié pour « démarrer » à partir d’un entier n0 :Soit A une partie de N telle que1. A contient n0.2. Si A contient un entier n n0, alors A contient n+1.Alors A = Jn0 ;+J.Propriété 1.6 Récurrence simple. Soit P une propriété portant sur les entiers naturels.Soit n0 un entier naturel.On suppose que Pn0 est vraie.On suppose également que pour tout entier n n0, si Pn est vraie, alors Pn+ 1 est vraie cela revient à direque l’implication Pn ⇒Pn+1 est vraie.Alors pour tout entier n n0, la proposition Pn est vraie.Démonstration. Soit P un propriété vérifiant les conditions de l’énoncé. Soit A = n N, Pn A est l’ensembledes entiers naturels tels que P est vraie. Alors A vérifie les conditions du théorème 1.1 ou plutôt de sa versionmodifiée de la remarque 1.14. Donc A = Jn0 ;+J et tout entier n n0 vérifie P.□Voici comment doit se faire un raisonnement par récurrence et comment il doit être rédigé.1. On énonce clairement la propriété P étudiée.2. On vérifie que la propriété P est vraie pour n0 Initialisation.3. On se donne un entier n n0 quelconque et on suppose que Pn est vraie Hypothèse de récurrence.On démontre alors que Pn+1 est vraie Hérédité.4. On conclut en annonçant que, par récurrence, la propriété est vraie pour tout entier n n0.Il faut voir le principe de récurrence comme une échelle que l’on essaye de monter : Si l’on est capable de poserle pied sur le premier barreau et que l’on est capable de passer d’un barreau au suivant, alors on est capable demonter l’échelle en entier. Si l’une des deux conditions manque, alors nous ne pouvons pas monter l’échelle. D’oùl’importance de vérifier l’initialisation ET l’hérédité. Une erreur classique est d’oublier l’initialisation. L’exemple 1.16est un exemple de cette erreur classique.Exemple 1.16. FAUX! Démontrer par récurrence que pour tout n N, on a l’égalité1+2+3+···+n = n2 +n+121. Soit Pn la propriété définie sur Npar « 1+2+3+···+n = n2 +n+12».2. L’élève oublie l’initialisation.3. Soit un entier n Ntel Pn est vraie. Démontrons alors que Pn+1 est vraie aussi. Nous devons donc1. Logique et raisonnement13
Page 20 : CPI12019/2020Algèbremontrer que1+2+3+···+n+n+1 = n+12 +n+1+12La fraction est égale à n2 +3n+32. Nous avons supposé que Pn est vrai, donc on peut écrire :1+2+···+n+n+1 = 1+2+···+n+n+1= n2 +n+12+n+1= n2 +n+1+2n+22= n2 +3n+32= n+12 +n+1+12Donc l’implication Pn ⇒Pn+1 est vraie.4. Nous avons donc montré par récurrence que pour tout entier n N, 1+2+3+···+n = n2 +n+12.Vous l’aurez compris, il y a une erreur. Un calcul simple permet de montrer que P1 est fausse puisqu’ellestipule que 1 = 32. Le premier barreau étant cassé, nous ne pouvons pas monter à l’échelle.Exemple 1.17. Démontrer par récurrence que pour tout n N, on a l’égalité1+2+3+···+n = nn+121. Soit Pn la propriété définie sur Npar 1+2+3+···+n = nn+12.2. Nous avons 1 = 11+12. Donc P1 est vraie.3. Soit un entier n Ntel Pn est vraie. Démontrons alors que Pn+1 est vraie aussi. Nous devons doncmontrer que1+2+3+···+n+n+1 = n+1n+22Nous avons supposé que Pn est vrai, donc on peut écrire :1+2+···+n+n+1 = 1+2+···+n+n+1= nn+12+n+1= nn+1+2n+12= n+1n+22Donc l’implication Pn ⇒Pn+1 est vraie.4. Nous avons donc montré par récurrence que pour tout entier n N, 1+2+3+···+n = nn+12.141. Logique et raisonnement
Page 21 : AlgèbreCPI12019/2020Il arrive parfois que supposer simplement Pn vraie ne suffise par à démontrer que Pn+ 1 soit vraie aussi etqu’il faut supposer en plus que Pk est vraie pour tout k n. C’est le principe de la récurrence forte.Propriété 1.7 récurrence avec prédécesseurs. Soit P une propriété portant sur les entiers naturels.Soit n0 et m deux entiers naturels.On suppose que Pn0, Pn0 +1, . . ., Pn0 +m sont vraies.On suppose également que pour tout entier n n0, l’implicationPn et Pn+1... et Pn+m ⇒Pn+m+1est vraie.Alors pour tout entier n n0, la proposition Pn est vraie.Démonstration. Admis.□Remarque 1.15. Attention à l’étape d’initialisation : il faut vérifier que la propriété est vraie pour les m+1 premièresvaleurs!Remarque 1.16. Le plus souvent Pn vraie et Pn+1 vraie suffit à montrer que Pn+2 est vraie. Dans ce casm = 1 on parle de récurrence double.Exemple 1.18. Soit un une suite réelle définie de la façon suivante : u0 = 1; u1 = 3 et pour tout entier n,un+2 = 3un+1 2un. Démontrer que n N, un = 2n+1 1.Nous allons faire la démonstration à l’aide d’une récurrence double.1. Soit Pn la propriété définie sur N par « un = 2n+1 1 ».2. Nous avons u0 = 1 = 20+1 1 et u1 = 3 = 21+1 1. Donc P0 et P1 sont vraies.3. Soit un entier n N tel que Pn et Pn+1 sont vraies. Démontrons alors que Pn+2 est vraie aussi.Nous devons donc montrer que un+2 = 2n+3 1. Nous avons supposé que Pn et Pn+ 1 sont vraies,c’est-à-dire un = 2n+1 1 et un+1 = 2n+2 1. Il s’en suit que :un+2 = 3un+1 2un= 32n+2 122n+1 1= 3×2n+2 32n+2 +2= 2×2n+2 1= 2n+3 1Donc Pn+2 est vraie et par conséquent l’implication Pn et Pn+1 ⇒Pn+2 aussi.4. Nous avons donc montré par récurrence double que pour tout entier n N, un = 2n+1 1.1. Logique et raisonnement15
Page 22 :

Page 23 : 2. EnsemblesIl faut n’appeler Science que l’ensembledes recettes qui réussissent toujours. Toutle reste est littérature.Paul Valéry/Moralités.2.1. DéfinitionsLa définition rigoureuse d’un ensemble est hors-programme. Pourtant vous en avez déjà une connaissance intui-tive et les manipulez déjà depuis longtemps. Nous allons pourtant en donner une définition, certes incorrecte, maislargement suffisante à notre niveau et bien meilleur qu’une simple « intuition ».Définition 2.1 Ensemble.— Soit un univers U contenant des objets, et des propositions vraies ou faussesà propos des éléments de U .Nous appelons ensemble la collection des éléments de U qui rendent vraie une proposition P.Si E est un ensemble et P la proposition permettant de construire E, on noteE = x U / PxLes objets x qui vérifient P sont appelés éléments de E. On note alors x E.Si un objet x n’est pas élément de E il ne vérifie donc pas P, on note x /E.— L’ensemble qui ne contient aucun élément est appelé ensemble vide et est noté /0.— Un ensemble qui ne contient qu’un seul élément est appelé singleton.Remarque 2.1. Si vous voulez comprendre pourquoi cette définition est inexacte, je vous invite à faire des recherchessur le paradoxe de Bertrand Russel et la collection y = x / x /x dont on peut montrer que si elle existe, alors ellen’existe pas. . .Remarque 2.2. Comme écrit en préambule, vous n’avez pas attendu cette définition tordue pour manipuler depuislongtemps des ensembles, en particulier les ensembles de nombre U est l’univers contenant tous les nombres réels :— N = x U / x 0 et l’écriture de x n’admet pas de décimales ensemble des entiers naturels.— Z = x U / l’écriture de x n’admet pas de décimales ensemble des entiers relatifs.— D = x U / la partie décimale de x est finie ensemble des décimaux.— Q = x U / x peut s’écrire comme le quotient de deux éléments de Z ensemble des rationnels.— R = x U / x est dans U ensembles des réels.— 2;π = x U / 2 x π intervalle.— x U / x Z et n Z / x = 2n = 2n / n Z ensemble des nombres pairs.17

Page 24 : CPI12019/2020AlgèbreRemarque 2.3. La définition 2.1 précédente est ce que l’on appelle une définition en compréhension. Les ensemblesayant un nombre fini d’éléments et pas trop grand peuvent être définis en extension, c’est-à-dire en énumérant tousleurs éléments d’où la nécessité d’en avoir un nombre fini pas trop important!. Par exemple les nombres premierspositifs inférieurs à 20 : 2,3,5,7,11,13,17,19. Dans ce cas, l’ordre dans lequel sont énuméré les éléments n’a pasd’importance.Définition 2.2 Égalité. Soit E et F deux ensembles. On dit que E et F sont égaux s’ils ont exactement lesmêmes éléments, c’est-à-dire si :x, x E ⇔x FOn note E = F.Définition 2.3 Inclusion. Soit E et F deux ensembles. On dit que E est inclus dans F ou que F contient E,ou encore que E est un sous-ensemble de F, ou encore que E est une partie de F si tous les éléments de Eappartiennent à F, c’est-à-dire si :x, x E ⇒x FOn note E F.Remarque 2.4. Il est clair que E = F ⇔E F et F ERemarque 2.5. Attention! Vous confondez souvent l’inclusion et l’appartenance, ce qui n’a strictement rien à voir :— Un élément appartient à un ensemble x E— Un ensemble est inclus dans un ensemble E FPar exemple une bille appartient à un sac de billes, mais elle n’est pas incluse dans ce sac.Un sac de billes est inclus dans un coffre à jouets, mais il n’appartient pas à ce coffre une bille est un jouet à partentière, mais un sac de billes n’est pas un jouet.Remarque 2.6. Méthode— Afin de montrer une inclusion E F, on doit montrer que tout élément x de E est dans F. La rédaction est doncforcément la suivante :Soit x E. Montrons que x F....D’où x F et E F.— Afin de montrer une égalité, il y deux manière de faire :Par équivalence : Cette méthode n’est pas recommandée car vous écrivez souvent des équivalences qui sonten réalité des implications. La rédaction est alors une succession d’équivalences :Soit x U .x E ⇔...⇔......⇔x F182. Ensembles
Page 25 : AlgèbreCPI12019/2020Par double inclusion : Comme son nom l’indique, on utilise la remarque 2.4 en montrant d’abord que E Fpuis que F E :E F : Soit x E. . . . Donc x F.F E : Soit x F. . . . Donc x E.Définition 2.4 Ensemble des parties. Soit E un ensemble. L’ensemble des parties de E est noté PE.Ainsi, pour tout ensemble F : F PE ⇔F ERemarque 2.7. Attention! Ouch! Nous avons utilisé le symbole « » avec un ensemble! Oui, car cette fois cetensemble est considéré comme un objet élément de l’ensemble des parties.Propriété 2.1. Pour tout ensemble, nous avons toujours E PE et /0 PE.Démonstration.—x, x E ⇒x EDonc par définition, E E et E PE.— De même :x,x /0zFaux. . .⇒x Ez. . .donc vrai. . .z. . . donc vrai!Donc par définition, /0 E et /0 PE.Exemple 2.1.P 0,1,2 =/0z0 élément,0,1,2z1 élément,0,1,0,2,1,2z2 éléments,0,1,2 z 3 éléments2.2. OpérationsDéfinition 2.5 Intersection et Union. Soit E et F deux ensembles.— On appelle intersection de E et F l’ensemble noté E F des éléments qui sont à la fois dans E et dans F.C’est-à-direx E F ⇔x E et x F— On appelle union de E et F l’ensemble noté E F des éléments qui sont dans E ou dans F. C’est-à-direx E F ⇔x E ou x F2. Ensembles19
Page 26 : CPI12019/2020AlgèbreRemarque 2.8. Vous aurez noté l’analogie à la fois dans le sens et dans la notation entre— l’intersection notée et le et logique noté aussi .— l’union notée et le ou logique noté aussi .Cette définition peut être généralisée à plus de deux ensembles.Définition 2.6 Intersection et Union d’une famille d’ensembles. Soit I un ensemble et EiiI une familled’ensembles.— On appelle intersection des Ei, i décrivant I, notée TiIEi, l’ensemble des éléments qui sont dans tous les Ei.C’est-à-dire x \iIEi!⇔i I, x Ei— On appelle union des Ei, i décrivant I, notée SiIEi, l’ensemble des éléments qui sont dans au moins l’un desEi. C’est-à-dire x iIEi!⇔i I, x EiRemarque 2.9.— En général, l’ensemble I de la définition précédente est un ensemble d’entiers naturels, mais pas forcément. Iln’est même pas obligé d’être discret!— On remarquera cette fois que l’intersection fait appel à la notion de « Pour tout » et que l’union fait appel àla notion de « Il existe » .Définition 2.7 Ensembles disjoints. Deux ensembles E et F sont dit disjoints si leur intersection est videE F = /0. Dans ce cas, on dit que l’union E F est une union disjointe et on la note parfois E F ou en-core E ˙F.Définition 2.8 Complémentaire et Différence. Soit E un ensemble, et A et B deux sous-ensembles de E.— On appelle complémentaire de A dans E l’ensemble des éléments de E qui ne sont pas dans A. Cet ensembleest noté E\A ou EA ou A ou A s’il n’y a pas d’ambigüité sur l’ensemble E pour les deux dernièresnotations. C’est-à-direEA = x E / x /A— On appelle différence de A dans B, notée B\A, l’ensemble des éléments appartenant à B, mais pas à A.C’est-à-direB\A = BA202. Ensembles

Page 27 : AlgèbreCPI12019/2020Définition 2.9 Différence symétrique. Soit E et F deux ensembles. On appelle différence symétrique de E etF, que l’on note EF, l’ensemble des éléments qui sont dans un et un seul des deux ensembles E et F. C’est-à-direEF = E F\E FDéfinition 2.10 n-uplet et Produit cartésien. Soit n N, n 2 et E1,E2,...,En, n ensembles.— Soit 1 k n et xk Ek. On appelle n-uplet de composantes x1, x2,. . .,xn dans cet ordre l’objet notéx1,x2,...,xn.— On appelle produit cartésien de E1, E2, . . ., En, que l’on note E1 × E2 × ··· × En, l’ensemble des n-upletsx1,x2,...,xn.Si E1 = E2 = ··· = En = E, on note simplement En le produit cartésien.Exemple 2.2. Si E et F sont deux ensembles, alors E ×F = x;y / x E et y FRemarque 2.10. Attention! Ne pas confondre un n-uplet dans lequel l’ordre des éléments compte et un ensemblex1,x2,...,xn dans lequel l’ordre des éléments importe peu :1;2 ̸= 2;11,2 = 2,1Définition 2.11 Partition. Soit E un ensemble, I un ensemble d’indices et EiiI une famille de parties de E.On dit que EiiI est une partition de E si :— Aucun des ensembles Ei n’est vide : i I, Ei ̸= /0.— Les Ei sont disjoints deux à deux : i; j I2, i ̸= j ⇒Ei E j = /0.— La réunion des ensembles Ei est égale à E tout entier : SiIEi = E.Dans ces conditions, tout élément x de E appartient à un sous-ensemble Ei unique.2.3. PropriétésPropriété 2.2 Règles de calculs sur l’intersection et l’union. Soit E un ensemble et A, B et C trois sous-ensembles de E.— AB = BA L’intersection est commutative— ABC = ABC L’intersection est asso-ciative— AE = E A = A E est l’élément neutre de l’in-tersection— AB = BA L’union est commutative— ABC = ABC L’union est associative— A /0 = /0 A = A /0 est l’élément neutre del’unionDémonstration. Toutes ces propriétés découlent des définitions et des mêmes propriétés sur les opérateurs logiqueset et ou . Toutefois, nous allons détailler le troisième point de l’intersection à vous d’adapter pour l’union :2. Ensembles21
Page 28 : CPI12019/2020AlgèbreAE A : Évident par définition de l’intersection.A AE : Soit x A. Puisque A E, nous avons x E. Par conséquent, il appartient à A et à E, donc à AE.D’où l’inclusion.Nous avons bien démontré l’égalité par double inclusion.□Propriété 2.3 Distributivité de l’intersection sur l’union et réciproquement. Soit E, F, G trois ensembles.Alors— E F G = E G F G distributivité àdroite de l’union sur l’intersection.— E F G = E F E G distributivité àgauche de l’union sur l’intersection.— E F G = E G F G distributivité àdroite de l’intersection sur l’union.— E F G = E F E G distributivité àgauche de l’intersection sur l’union.Démonstration. Cela provient tout simplement des propriétés démontrées dans l’exercice 1.1 du chapitre 1« Logique et raisonnement ».□Remarque 2.11. Afin de retenir plus facilement ces quatre formules, il suffit de remplacer « » par « + » et « » par« × », et inversement. En effet, vous avez depuis longtemps sans l’avoir nommé que la multiplication est distributiveà droite et à gauche sur l’addition.Remarque 2.12. Généralisation Ces propriétés peuvent se généraliser à une famille infinie d’ensembles :E \iIFi!=\iIE FiE iIFi!=iIE FiDans le cas d’une famille finie, il suffit de faire une récurrence. Montrons la seconde égalité pour une famille quel-conque.Démonstration.: Soit x E iIFi!. Il appartient donc d’une part à E, d’autre part à l’unioniIFi. Donc il existe j I, tel quex Fj. Donc, puisque x appartient aussi à E, il appartient à E Fj. Et puisqu’il existe un j I tel que x E Fj,il appartient à l’union :iIE Fi.: Soit x iIE Fi. Donc il existe un j I, tel que x E Fj. Il appartient donc d’une part à E et d’autre partà Fj. Ainsi, il appartient aussi à l’unioniIFi. Mais comme il appartient aussi à E, il appartient à l’intersection :E iIFi!222. Ensembles

Page 29 : AlgèbreCPI12019/2020Propriété 2.4 Passage au complémentaire. Soit E un ensemble et, A et B deux sous-ensembles de E.— A = A— AB = AB— AB = ABDémonstration. Cela découle encore des propriétés de logique, notamment des lois de De Morgan vues dans lapropriété 1.2 du chapitre 1 « Logique et raisonnement ».□Remarque 2.13. Généralisation Là encore, cela se généralise à une famille infinie d’ensembles :iIAi =\iIAi\iIAi =iIAiLa démonstration est simple la deuxième vous est laissée en exercice :Démonstration.x iIAi ⇔x /iIAi ⇔i I, x /Ai ⇔i I, x Ai ⇔x \iIAi□2. Ensembles23

Page 30 :

Page 31 : 3. Relations binairesL’autorité, c’est moins la qualité d’unhomme qu’une relation entre deux êtres.Maurice Barrès.3.1. VocabulaireDéfinition 3.1 Relation. On appelle relation, notée R, la donnée de :— Un ensemble de départ E non vide.— Un ensemble d’arrivée F non vide.— Un graphe G E ×F, c’est-à-dire une partie de E ×F.Soit x E et y F. Si x;y G, on dit que x est en relation avec y pour R et on notera xRy. Dans ce cas, y estappelé image de x par R et x un antécédent de y par R.Définition 3.2 Relation binaire. Soit E un ensemble non vide. On appelle relation binaire sur E une relationdont E est à la fois l’ensemble de départ et l’ensemble d’arrivée.Remarque 3.1. Une relation binaire sur E est donc tout simplement un sous-ensemble de E2.Définition 3.3. Soit R une relation binaire sur un ensemble E. On dit que R estRéflexive lorsque :x E, xRxSymétrique lorsque :x;y E2, xRy ⇒yRxAntisymétrique lorsque :x;y E2, xRy et yRx ⇒x = yTransitive lorsque :x;y;z E3, xRy et yRz ⇒xRz25
Page 32 : CPI12019/2020Algèbre3.2. Relations d’équivalenceDéfinition 3.4 Relation d’équivalence. On dit qu’une relation binaire R sur un ensemble E est une relationd’équivalence lorsqu’elle est réflexive, symétrique, transitive « RST ».Définition 3.5 Classe d’équivalence. Soit R une relation d’équivalence sur un ensemble E et x E. On appelleclasse d’équivalence de x l’ensemble des éléments de E en relation avec x :cℓx = y E / xRyPropriété 3.1. Soit E un ensemble et R une relation d’équivalence sur E. Alors1. x,y E, cℓx = cℓy ⇔xRy2. Les classes d’équivalence forment une partition de E.Démonstration.1. Soit x;y E2.⇒y cℓy = cℓx, donc xRy.⇐Soit z cℓx. Nous avons donc xRz. Or par hypothèse, xRy. Donc par symétrie et transitivité, nousavons yRz, c’est-à-dire z cℓy.Même démonstration en intervertissant x et y.2.a Elles sont clairement non vides, puisque pour tout x E, x cℓx réflexivité.b Soit z cℓycℓx, par transitivité et symétrie nous avons :t E, t cℓx ⇔xRt ⇔tRz ⇔tRy ⇔t cℓyD’où cℓx = cℓy. Les classes sont donc deux à deux disjointes.cPar définition d’une classe d’équivalence, il est évident quexEcℓx EPuisque pour tout x E, nous avons x cℓx c’est-à-dire x cℓx, nous en déduisons que :E =xEx xEcℓxPar double inclusion, nous avons bien E =xEcℓx.Exemple 3.1. Vous connaissez déjà des relations d’équivalence :— L’égalité « = » entre deux nombres complexes, deux ensembles, deux fonctions, deux . . .— La relation d’équivalence oui!, c’est pour cela que cela s’appelle ainsi. Comme quoi les maths, c’est bienfait, non? « ⇔».— La relation de congruence modulo un réel rencontrée depuis la seconde en trigonométrie : Soit θ Retx,y R. On dit que x est congru à y modulo θ, si et seulement si :x = ymod θ ⇔k Z, x = y+kθ263. Relations binaires

Page 33 : AlgèbreCPI12019/2020Remarque 3.2. Ceux qui ont fait de l’arithmétique en spécialité maths ont aussi vu la congruence sur Z.C’est exactement la même, mais avec des entiers.3.3. Relations d’ordreDéfinition 3.6 Relation d’ordre. Soit E un ensemble et R une relation binaire sur E. On dit que R est unerelation d’ordre lorsqu’elle est réflexive, antisymétrique, transitive.On les note généralement ou . On dit alors que E ;R est un ensemble ordonné.Exemple 3.2. Là encore vous connaissez déjà des relations d’ordre :— sur R, mais aussi sur l’ensemble des fonctions.— sur PE.— Mais aussi « l’ordre alphabétique » sur l’ensemble des mots d’où son nom!De plus si est une relation d’ordre, on peut toujours définir une relation d’ordre « inverse », que l’on notera ,parx;y E2, x y ⇔y xDéfinition 3.7 Relation d’ordre stricte. Soit E un ensemble et R une relation binaire sur E. On dit que R estune relation d’ordre stricte lorsqu’elle est transitive et pour tout x;y E2, xRy ⇒x ̸= yDéfinition 3.8 Relation stricte associée à une relation d’ordre. Soit E un ensemble et une relation d’ordresur E. La relation sur E définie pour tous x,y E par :x y ⇔x y et x ̸= yest transitive et est appelée la relation stricte associée à .Démonstration. Montrons que la relation ainsi définie est bien transitive et donc une relation d’ordre stricte,puisque la condition xRy ⇒x ̸= y est incluse dans la définition. Soit donc x,y,z E tels que x y et y z.Montrons que x z. Nous avons donc x y et y z, donc par transitivité de , x z. Il ne reste plus qu’à démontrerque x ̸= z. Supposons que x = z, alors x y et y z = x, donc par antisymétrie de , nous avons y = x. Or x ̸= ypuisque x y. Donc x ̸= z et x z.La relation ainsi définie est donc bien une relation d’ordre stricte.□Remarque 3.3. Comme l’indique 2 sur son excellent site, la relation est aussi antisymétrique. Cependant la raisonde son antisymétrie est vraiment tordue, au point que la démonstration de 2 est fausse ce qui ne dénature en rienl’excellente qualité de ses cours! Voyons cela en détail :Nous devons montrer que x;y E2, x y et y x ⇒x = y. Soit donc x;y E2.Si x = y : Dans ce cas, la relation x y est fausse, donc x y et y x est fausse aussi et l’implication est vraie.Oui! Rappelez-vous, si P est fausse, alors P ⇒Q est vraie.Si x ̸= y : Supposons que l’on ait x y et y x, alors dans ce cas, on a x y et y x, donc pas antisymétrie de ,x = y. Ceci est absurde, donc l’hypothèse de départ ne peut être vraie. Cela veut dire que soit x y, soit y x3. Relations binaires27

Page 34 : CPI12019/2020Algèbreou les deux à la fois, voir la définition d’un ordre total 3.9.Là encore, puisque la proposition x y et y x est forcément fausse, l’implication est vraie!Vous constatez que l’implication n’est vraie uniquement parce que la propriété x y et y x est toujours fausse.Vous constatez du même coup l’importance d’avoir mis une implication dans la définition de l’antisymétrie. Si on seramène à la première relation antisymétrique rencontrée dans votre scolarité, c’est-à-dire « » sur les réels, on seraittenté de se dire que si x = y, alors oui, x y et y x, et donc on peut mettre une équivalence à la place de l’implication.C’est là que se ramener à des exemples simples que l’on maitrise pour comprendre une définition peut vous fairetomber dans un piège. En effet, si on met une équivalence dans la définition de l’antisymétrie, la relation d’ordrestricte associée à une relation d’ordre n’est plus antisymétrique puisque la proposition x = y ⇒x y et y x estfausse.Une remarque sur cette remarque : d’après la définition d’un ordre stricte, rien n’oblige la relation stricte associée àêtre antisymétrique. Donc finalement rien n’empêche de mettre une équivalence dans la définition de l’antisymétrie.C’est vrai. Cela vous montre qu’en mathématiques, tout est question de choix dans les définitions mais surtout decohérence des les propriétés énoncées par la suite!Définition 3.9 Ordre total. Soit E un ensemble et une relation d’ordre sur E. On dit que est une relationd’ordre total et que E ; est un ensemble totalement ordonné lorsquex;y E2, x y ou y xDans le cas contraire, l’ordre est dit partiel et E ; est dit ensemble partiellement ordonné.Remarque 3.4. En des termes plus simples, l’ordre est total si tous les éléments peuvent se comparer entre eux. Larelation « » est un ordre total. Cependant la relation « » est un ordre partiel puisque tous les ensembles ne sontpas forcément inclus les uns dans les autres.Définition 3.10 Majorant/Minorant. Soit E ; un ensemble ordonné, A E et m E. On dit que :— m est un minorant de A si x A, m x. On dit alors que A est minoré.— m est un majorant de A si x A, x m. On dit alors que A est majoré.— A est borné si il est minoré et majoré.Définition 3.11 Plus petit/grand élément, minimum/maximum. Soit E ; un ensemble ordonné, A E etm E. On dit que :— m est un plus petit élément ou un minimum de A si m est un minorant de A et m A.— m est un plus grand élément ou un maximum de A si m est un majorant de A et m A.Remarque 3.5. D’après la définition, il n’est pas clair qu’un minimum ou maximum existe toujours, ni qu’il soitunique. Par exemple, dans l’ensemble E = R;, A = 0;1 est bien minoré, majoré, donc borné, admet un maximum1, mais pas de minimum 0 ̸= 0;1. Quant à l’unicité. . .283. Relations binaires
Page 35 : AlgèbreCPI12019/2020Propriété 3.2 Unicité du minimum/maximum. Soit E ; un ensemble ordonné et A E.— Si A admet un minimum, alors il est unique et on le note minA.— Si A admet un maximum, alors il est unique et on le note maxA.Démonstration. Supposons que A possède deux minima m1 et m2. Par définition d’un minimum, nous avons m1 Aet m2 A. De plus, par définition d’un minorant, nous avons aussi m1 m2 et m2 m1, d’où m1 = m2 et l’unicité s’ilexiste du minimum.□Définition 3.12 Borne inférieure/supérieure. Soit E ; un ensemble ordonné et A E.— Si l’ensemble B des minorants de A est non vide et si B a un plus grand élément, m, alors celui-ci est appeléborne inférieure de A. On le note m = infA.— Si l’ensemble C des majorants de A est non vide et si C a un plus petit élément, M, alors celui-ci est appeléborne supérieure de A. On le note M = supA.Remarque 3.6. Vous remarquez qu’une borne supérieure ou inférieure n’appartient pas forcément à l’ensemble A.Exemple 3.3.— Dans R;, A = 0;1. Comme nous l’avons vu, A ne possède pas de minimum, son maxi-mum est 1. Sa borne supérieure est supA = 1 et sa borne inférieure est infA = 0.— Soit E un ensemble et, A et B deux parties de E. On munit PE de la relation d’ordre partiel « ».L’ensemble A,B admet un plus petit élément et du coup un plus grand si et seulement si A B ouB A. Dans ce cas, la borne inférieure est A ou B et la borne supérieure est B ou A.Dans tous les cas, la borne inférieure est A B et la borne supérieure est A B. En effet, A B A etA B B, donc A B est un minorant de A,B. De plus, si C est un minorant de A,B, alors C A etC B, donc C AB. En conclusion, AB est bien le pus grand des minorants, soit la borne inférieure.De même pour AB.Propriété 3.3. Soit E ; un ensemble ordonné et A E.— Si A admet un minimum, alors A admet une borne inférieure et minA = infA.— Si A admet un maximum, alors A admet une borne supérieure et maxA = supA.Démonstration. Supposons que A admette un minimum m et montrons que m est le plus grand des minorants deA. Tout d’abord, par définition d’un minimum, m est bien un minorant de A. Ensuite, soit x un minorant de A, pardéfinition et puisque m A c’est un minimum, nous avons x m. Ainsi, m est bel et bien le plus grand des minorants,soit la borne inférieure de A.□3. Relations binaires29
Page 36 :

Page 37 : 4. Applications4.1. FondamentauxDéfinition 4.1 Application. Soit R une relation d’ensemble de départ E, d’arrivée F et de graphe G. La relationR est appelée application si et seulement si tout antécédent x de E possède une unique image y de F.Dans ce cas, au lieu d’écrire xRy, on écrira y = Rx et y est l’image de x par R.L’ensemble des applications de E vers F est noté FE ,F ou encore FE.Remarque 4.1.— Les applications ressemblent énormément aux fonctions. La seule différence qui n’est pas au programme, doncvous avez le droit de les confondre est que pour une application, tout élément de E possède une et une seuleimage l’application est définie partout, alors que pour une fonction, tout élément de E possède au plus uneimage donc soit pas d’image, soit une seule, elle n’est pas forcément définie partout.— Pour désigner une application donc une fonction, on utilise en générale une lettre minuscule et on écrit :f : E→Fx7→y = fx— La nature des ensembles E et F n’est pas précisée. Ce ne sont donc pas forcément des ensembles de réels. Onpeut avoir des applications sur n’importe quels objets mathématiques des vecteurs, des matrices, des applica-tions. . .. De même pour l’ensemble d’arrivé. Ainsi, on peut avoir une fonction qui à un vecteur associe unefonction.Définition 4.2 Égalité entre applications. Soit E, F deux ensembles et f, g deux applications de E dans F.On dit que f et g sont égales si et seulement six E, fx = gxDans ce cas, on note f = g.Remarque 4.2. Oui, vous savez déjà ce que veut dire l’égalité entre deux fonctions, mais nous sommes là pour êtrerigoureux et définir correctement toutes les notations utilisées!Définition 4.3 Famille. Soit E un ensemble et I un ensemble dont les éléments sont appelés indices. On appellefamille d’éléments de E indexée par I toute application de I dans E.31

Page 38 : CPI12019/2020AlgèbreRemarque 4.3.— Vous remarquez que finalement une famille est une application et une application est une famille. C’est justedeux manières différentes de voir le même objet mathématique, mais aussi deux manières différentes de lenoter : au lieu de noter une famille comme une fonction on notera plutôt xiiI EI.— Nous avons déjà utilisé, de manière purement intuitive, la notion de famille d’ensembles dans le chapitre pré-cédent « Ensembles ». C’est finalement une application de I dans PE.Exemple 4.1. Vous avez déjà rencontré cette notation pour les suites réelles : UnnN. Une suite réelle est donctout simplement une fonction f de N dans R, telle que fn = Un.Encore plus simplement, un famille x1,...,xn d’éléments de E est aussi une application g de J1;nK dans E telleque g1 = x1,...,gn = xn.Définition 4.4 Fonction identité. Soit E un ensemble. On appelle identité de E l’application de E dans Edéfinie parx E, IdEx = xRemarque 4.4. Cette application peut sembler inutile puisqu’elle ne fait rien. Cependant, nous en avons besoin parexemple pour déterminer la dérivée d’une fonction réciproque. De plus, vous la connaissez déjà! Dans R, c’est lafonction dont la courbe représentative le graphe, donc est la droite d’équation y = x.Définition 4.5 Restriction, prolongement. Soit E, F deux ensembles, A E et f FE.— La restriction de f à A est l’application :fA : A→Fx7→fx— Si g est une application de A dans F, on dit que f est un prolongement de g à E si et seulement si fA = g.4.2. CompositionDéfinition 4.6 Composition. Soit E, F, G trois ensembles et f, g deux applications : f FE et g GF. Onappelle composée des applications f et g, l’application de E dans G, notée g◦f, définie par :x E, g◦fx = g fxRemarque 4.5. Afin de ne pas se perdre entre les ensembles d’arrivées, de départs et le sens de la compositionsurtout si on cumule plusieurs compositions, on peut avoir recours à un diagramme commutatif :EFGxfxg fxfg324. Applications
Page 39 : AlgèbreCPI12019/2020Propriété 4.1 Associativité. La composition des applications est associative, c’est-à-dire, soit E, F, G, H quatreensembles et soit f FE, g GF, h HG alorsh◦g◦f = h◦g◦fDémonstration. Soit x E, y = fx, z = gy, t = hz, gf = g ◦f et hg = h ◦g. Nous avons gfx = g ◦fx =gy = z, d’où h◦g◦fx = h◦gfx = hgfx = hz = t. De même, hgy = h◦gy = hgy = hz = t eth◦g ◦fx = hg◦fx = hgy = t. D’où l’égalité quelque soit x E, donc des deux applications.□Remarque 4.6. Cette propriété 4.1, permet d’alléger l’écriture en retirant les parenthèses puisqu’il n’y a pas d’am-bigüité : h◦g◦f = h◦g◦f.Propriété 4.2 Élément neutre de la composition. Soit E, F deux ensembles et f une application de E dans F.AlorsIdF ◦f = f ◦IdE = fOn dit que l’identité est un élément neutre pour la composition.Démonstration. Évident.□4.3. Fonction indicatriceDéfinition 4.7 Fonction indicatrice. Soit E un ensemble et A E. On appelle fonction indicatrice ou fonctioncaractéristique de A, l’application définie sur E par :1A :E→Rx7→1Ax = 1si x A1Ax = 0si x /ARemarque 4.7. La fonction indicatrice nous permet simplement de savoir si un élément appartient à un ensemble oupas.Propriété 4.3. Soit E un ensemble et A, B deux sous-ensembles de E. Alors1A =1B ⇔A = BDémonstration.⇒:A B : Soit x A. Nous avons1Bx =1Ax = 1, donc x B.4. Applications33
Page 40 : CPI12019/2020AlgèbreB A : Même raisonnement.⇐: Évident.Propriété 4.4. Soit E un ensemble et A, B deux sous-ensembles. Alors1.12A =1A2.1A = 11A3.1AB =1A1B4.1AB =1A +1B 1A1BDémonstration.1. Évident du fait que 02 = 0 et 12 = 1.2. Cela provient simplement du fait que 1 0 = 1 et 1 1 = 0 C’est d’ailleurs une astuce souvent utilisée eninformatique pour échanger 1 et 0.3. Si x AB, alors1ABx = 1, mais on a aussi x A et x B, d’où1Ax1Bx = 1×1 = 1. Si x /AB, alors1ABx = 0. Mais si x /A B, alors soit x /A, soit x /B, dans les deux cas, le produit1Ax1Bx est nul.D’où l’égalité des fonctions.4. Trois cas de figure se présentent :— Soit x AB, dans ce cas, x AB et1ABx = 1, mais on a aussi1Ax+1Bx1ABx = 1+11 =1. D’où l’égalité.— Soit x appartient à l’un et un seul des deux ensembles et donc pas à l’intersection. Dans ce cas x ABet1ABx = 1. Mais on a aussi1Ax+1Bx1ABx = 1+00. D’où l’égalité.— Soit x n’appartient à aucun des deux ensembles. Dans ce cas,1ABx = 0 et1Ax+1Bx1ABx =0+00 = 0. D’où l’égalité.D’où l’égalité des fonctions.Exemple 4.2. En se basant sur la propriété 4.3, les fonctions indicatrices permettent de démontrer très simple-ment l’égalité entre deux ensembles. Par exemple : Si A, B et C sont trois parties d’un ensemble E, alors1ABC =1A1BC1ABAC =1AB +1AC 1AB1AC=1A 1B +1C 1B1C=1A1B +1A1C 1A1B1A1C=1A1B +1A1C 1A1B1C=1A1B +1A1C 1A1B1CD’où l’égalité ABC = ABAC.4.4. Image directe et réciproqueDéfinition 4.8 Image directe. Soit E, F deux ensembles, f FE et X E. On appelle image de X par f, lesous-ensemble de F défini par :fX = y F / x X, fx = yRemarque 4.8. L’image de X par f est tout simplement l’ensemble des images des éléments x de X par f.Propriété 4.5. Soit E, F deux ensembles, f FE et A, B deux parties de E.1. Si A B, alors fA fB.2. fAB fAfB.3. fAB = fAfB.344. Applications

Page 41 : AlgèbreCPI12019/2020Démonstration.1. Supposons que A B. Soit y fA, montrons que y fB. Puisque y fA, il existe x Atel que fx = y. Or x A B, donc il existe x B tel que fx = y. D’où y fB.2. Voir correction du TD.3. Voir correction du TD.Définition 4.9 Image réciproque. Soit E, F deux ensembles, f FE et Y F. On appelle image réciproquede Y par f le sous-ensemble de E défini par :f 1Y = x E / fx YRemarque 4.9. L’image réciproque de Y est tout simplement l’ensemble des antécédents qui ont une image dans Y.Donc ce que l’on note pour l’instant f 1 n’est PAS une application, f 1Y est un ensemble contrairement à ce quevous avez peut-être déjà vu et que l’on verra plus tard. . .Propriété 4.6. Soit E, F deux ensembles, f FE et C, D deux parties de F.1. Si C D, alors f 1C f 1D.2. f 1C D = f 1Cf 1D.3. f 1C D = f 1Cf 1D.Démonstration.1. Supposons que C D. Soit x f 1C, montrons que x f 1D. Puisque x f 1C,fx C. Mais comme C D, fx D, ainsi, x f 1D.2. Voir correction du TD.3. Voir correction du TD.4.5. Injections, Surjections, BijectionsDéfinition 4.10 Injection, Surjecction, Bijection. Soit E, F deux ensembles et f FE. On dit que :— f est injectivesi et seulement si x1,x2 E, x1 ̸= x2 ⇒fx1 ̸= fx2si et seulement si x1,x2 E, fx1 = fx2 ⇒x1 = x2— f est surjective si et seulement si y F, x E, fx = y— f est bijectivesi et seulement si f est injective et surjectivesi et seulement si y F, !x E, fx = yRemarque 4.10.— La fonction f est injective signifie que chaque élément de F a au plus un antécédent.— La fonction f est surjective signifie que chaque élément de F a au moins un antécédent.— La fonction f est bijective signifie que chaque élément de F a exactement un antécédent.4. Applications35

Page 42 : CPI12019/2020AlgèbreRemarque 4.11. Une fonction est toujours surjective sur son ensemble image. Ainsi, une fonction injective est tou-jours bijective sur son ensemble image.Exemple 4.3.— L’exemple le plus simple de fonction bijective est tout simplement la fonction identité IdE.— L’injectivité, la surjectivité et donc la bijectivité d’une fonction dépend grandement des ensembles E et F.La fonctionf : R→Rx7→x2n’est pas injective car f1 = f1.n’est pas surjective car y 0 n’a pas d’antécédent.n’est pas bijective car ni injective ni surjective.g = fR+ : R+→Rx7→x2est injective car nous avons restreint l’ensemble des anté-cédent à R+ Nous aurions pu le restreindre à Rou à touteautre partie de Rou R+.n’est pas surjective car y 0 n’a pas d’antécédent.n’est pas bijective car pas surjective.h : R→R+x7→x2n’est pas injective.est surjective car nous avons restreint l’ensemble desimages à R+.n’est pas bijective car pas injective.c : R+→R+x7→x2est injective.est surjective.est bijective car injective et surjective.Propriété 4.7. Soit E, F, G trois ensembles et f FE, g GF1. Si g◦f est injective, alors f est injective.2. si g◦f est surjective alors g est surjective.Démonstration.1. Soit x1 et x2 dans E tels que fx1 = fx2. Montrons que x1 = x2. De l’égalité fx1 =fx2 nous déduisons que g fx1 = g fx2, c’est-à-dire g◦fx1 = g◦fx2. Par injectivité de g◦f, nousdéduisons que x1 = x2.2. Soit z G, montrons qu’il possède un antécédent par g dans F. La surjectivité de g◦f nous donne l’existencede x E, tel que g◦fx = z. En posant y = fx F, nous avons l’existence de y F tel que gy = z, d’où lasurjectivité de g.Définition 4.11 Bijection réciproque. Soit E, F deux ensembles, f FE une application bijective. On appelleapplication réciproque de f l’application de F dans E qui à tout élément de F associe son unique antécédent dansE.f 1 : F→Ey7→x tel que fx = yRemarque 4.12. Soit f une fonction bijective de E dans F.— Soit x E et y = fx son image. Donc par définition, f 1y = x. Ainsi f 1 fx = f 1y = x. Nous avonsmontré que f 1 ◦f = IdE.364. Applications

Page 43 : AlgèbreCPI12019/2020— Soit y F et x son unique antécédent. Donc par définition fx = y et f 1y = x. Ainsi ff 1y= fx = y.Nous avons montré que f ◦f 1 = IdF.Remarque 4.13. Si f est bijective, alors pour tous x E et y F,y = fx ⇔x = f 1ySi f est une fonction de R dans R, cette équivalence signifie que la courbe représentative de f et celle de f 1 sontsymétriques l’une de l’autre par rapport à la droite d’équation y = x première bissectrice.Propriété 4.8. Soit E, F deux ensembles et f FE.La fonction f est bijective si et seulement si il existe g EF telle que f ◦g = IdF et g◦f = IdE.Dans ce cas, la fonction g est égale à la réciproque de f.Démonstration. Condition nécessaire : Cela vient tout simplement de la définition de la réciproque f 1 qui vérifief ◦f 1 = IdF et f 1 ◦f = IdE. On pose alors g = f 1.Condition suffisante : Nous avons f ◦g = IdF or IdF est surjective, donc d’après la propriété 4.7, f est surjective.De même, g◦f = IdE est injective donc f est injective. En conclusion, f est bijective.Puisque f est bijective, elle possède une réciproque f 1. En composant à gauche par f 1 l’égalité f ◦g = IdF,nous obtenons g = IdE ◦g = f 1 ◦f◦g = f 1 ◦ f ◦g = f 1 ◦IdF = f 1. La réciproque est donc l’unique fonctionvérifiant les deux égalités et elle est unique, au cas où nous ayons pas assez insisté là-dessus.□Propriété 4.9. Soit E, F et G trois ensembles, et f FE, g GF deux fonctions.1. Si f et g sont injectives alors g◦f est injective.2. Si f et g sont surjectives alors g◦f est surjective.3. Si f et g sont bijectives alors g◦f est bijective. Dans ce cas, g◦f1 = f 1 ◦g1Démonstration.1. Soit x1 et x2 deux éléments de E tels que g◦fx1 = g◦fx2. Par injectivité de g, nous avonsdonc fx1 = fx2. Par injectivité de f, nous en déduisons que x1 = x2. Donc g◦f est injective.2. Soit z G. Par surjectivité de g, il existe y F tel que gy = z. Par surjectivité de f, il existe x E tel quefx = y. Finalement, nous avons g◦fx = z, d’où la surjectivité de g◦f.3. La bijectivité de g◦f est immédiate à partir des points précédents. Pour le second point :f 1 ◦g1◦g◦f =f 1 ◦g1 ◦g ◦f = f 1 ◦f = IdE. De même, g◦f ◦f 1 ◦g1= g ◦f ◦f 1 ◦g1 = g ◦g1 = IdF. Doncd’après la propriété 4.8, nous avons bien g◦f1 = f 1 ◦g1.Propriété 4.10 Réciproque et image réciproque. Soit E, F deux ensembles, f FE bijective et B F. Alors :f ←B = f 1Boù l’on note f ←B l’image réciproque de B par f et f 1B l’image directe de B par f 1.4. Applications37

Page 44 : CPI12019/2020AlgèbreRemarque 4.14. Avant de démontrer cette propriété, arrêtons nous un instant afin de bien comprendre ce qui est écrit.D’abord nous avons déjà vu que si A est un ensemble, alors on note fA l’ensemble des images des éléments de Apar f, c’est ce que l’on appelle l’image directe de A par f. Ainsi, il est normal de noter l’image directe de B par f 1,f 1B.Ensuite, nous avons défini pour une partie B de F son image réciproque par f, comme étant l’ensemble des antécédentss’ils existent des éléments de B. Nous avons noté cet ensemble f 1B.Vous remarquez que nous avons la même notation pour deux choses bien distinctes en général, ce qui poseproblème. C’est pour cela que dans le cadre de cette propriété, le second ensemble est noté f ←B. Ce que dit cettepropriété, c’est que lorsque f est bijective, finalement ces deux ensembles sont égaux et il n’y a donc pas d’ambigüitédans la notation.Sachant que l’application f 1 n’est définie que lorsque f est bijective, il n’y a donc jamais ambigüité :— Si f est quelconque, alors f 1B représente l’image réciproque de B par f.— Si f est bijective, alors f 1B représente l’image réciproque de B par f, qui est égale à l’image directe de Bpar f 1.Démonstration. Soit x E :x f 1B ⇔b B / x = f 1b ⇔b B / fx = b⇔fx B ⇔x f ←BDéfinition 4.12 Involution. Soit E un ensemble et f EE. On dit que f est involutive ou que f est une invo-lution de E lorsque f ◦f = IdE.Dans ce cas, f est bijective et elle est sa propre réciproque : f 1 = f.Exemple 4.4. La conjugaison dans C est une involution de C, les symétries axiales et ponctuelles sont desinvolutions du plan et la fonction inverse : f : R→Rx7→1xest une involution de R.384. Applications

Page 45 : 5. Nombres complexesDans ce chapitre sur les nombres complexes, nous allons partir du principe que vous les avez déjà vu et acquis enterminale. Nous nous contenterons de faire de brefs rappels dans la première partie.5.1. Rappels de TerminaleThéorème 5.1 Et définitions.— L’ensemble des nombres complexes est noté C et contient l’ensemble des réels R ainsi qu’un certain élémenti pour lequel i2 = 1.— Tout nombre complexe z s’écrit d’une et une seule manière sous la forme dite algébrique : z = a+ ib pourcertains a,b R. Le réel a est appelé partie réelle de z et noté Rez, le réel b est appelé partie imaginaire dez et noté Imz.— Les réels sont exactement les nombres complexes de partie imaginaire nulle. Enfin, un nombre complexe departie réelle nulle est appelé un imaginaire pur.Remarque 5.1. L’unicité de la forme algébrique d’un nombre complexe est utilisée fréquemment pour faire desidentifications. Nous avons z = a+ib = z′ = a′ +ib′ ⇔a = a′ et b = b′. Ainsi une égalité sur des nombres complexesest ramenée à deux égalités sur les réels.Théorème 5.2 Et définitions. L’ensemble C est muni de deux opérations d’addition et de multiplication qui gé-néralisent celles que nous connaissons sur R. Précisément, pour tout z,z′ C :— z+z′ = Rez+Rez′+iImz+Imz′— zz′ = RezRez′ImzImz′+iRezImz′+ImzRez′D’où :— Rez+z′ = Rez+Rez′— Imz+z′ = Imz+Imz′— Rezz′ = RezRez′ImzImz′— Imzz′ = RezImz′+ImzRez′Enfin, pour tout z = x+iy Cavec x,y R : 1z =1x+iy = xiyx2+y2 .Définition 5.1 Affixe et image. On munit le plan d’un repère orthonormal directO;→i ;→j.— Pour tout z = x + iy C avec x,y R, le point M du plan de coordonnées x;y est appelé l’image de ztandis que z est appelé l’affixe de M. On dit aussi que z est l’affixe du vecteur du plan de coordonnées x;y.— Règles de calcul sur les affixes— Pour tout vecteur →u et →v du plan d’affixes respectifs u et v et pour tout λ,µ R, le vecteur λ→u +µ→va pour affixe λu+µv.— Pour tout point A et B du plan d’affixes respectifs a et b, le vecteur →AB a pour affixe ba.39

Page 46 : CPI12019/2020AlgèbreDéfinition 5.2 Conjugué, module. Soi z C.— On appelle conjugué de z le nombre complexe z = ReziImz.— On appelle module de z le réel positif ou nul z =pRez2 +Imz2.Remarque 5.2.— Module et valeur absolue coïncident sur R car pour tout x R, x =x2.— De par sa définition, le module z s’interprète comme norme du vecteur d’affixe z. De même, pour tout a,b Cd’images A,B, le module ab est autre que la distance AB. Il en découle que pour tout R 0 :— le cercle de centre A et de rayon R est l’ensemble z C / za = R— le disque fermé de centre A et de rayon R est l’ensemble z C / za R— le disque ouvert de centre A et de rayon R est l’ensemble z C / za RThéorème 5.3 Propriété du conjugué. Pour tout z,z′ C :Rez = z+z2Imz = zz2iz = zz+z′ = z+z′zz′ = z×z′Théorème 5.4 Propriétés du module. Soit z,z′ C :Propriétés algébriques : z = z, zz = z2, zz′ = z×z′ et si z′ ̸= 0, zz′ = zz′. Enfin, z = 0 ⇔z = 0.Propriétés géométriques : Rez z et Imz z.Inégalités triangulaires : z+z′ z+z′ et zz′ z±z′ z+z′.Théorème 5.5. Soit z C.— z R ⇔Imz = 0 ⇔z = z.— z iR ⇔Rez = 0 ⇔z = z.5.2. Exponentielle complexe5.2.1. Groupe U des nombres complexes de module 1Définition 5.3 Ensemble U. On note U l’ensemble des nombres complexes de module 1, c’est-à-direU = z C / z = 1L’ensemble U est représenté par le cercle trigonométrique de centre O et de rayon 1.405. Nombres complexes

Page 47 : AlgèbreCPI12019/2020Propriété 5.1. L’ensemble U est stable par multiplication et par passage à l’inverse. C’est-à-dire quez,z′ U, zz′ Uz U, 1z UDémonstration. zz′ = zz′ = 1×1 = 1 et1z = 1z = 11 = 1 0 n’appartient pas à U.□Remarque 5.3. Attention!! La propriété 5.1 parle du produit de deux complexes, mais pas de la somme. Il y a unebonne raison à cela. Un contre-exemple tout bête : z = 1 U et z′ = 1 U, pourtant z+z′ = 0 /U.5.2.2. Exponentielle imaginaireLemme 5.1. Soit a et b deux réels tels que a2+b2 = 1. Il existe un réel non unique θ tel que a = cosθ et b = sinθ.Démonstration. Puisque a2 + b2 = 1, nécessairement 1 a 1 et 1 b 1. En nous appuyant sur le cercletrigonométrique, on remarque qu’il existe un réel α tel que cosα = a. Comme cos2 α + sin2 α = 1, nous avonsb2 = sin2 α. Ainsi on a sinα = b ou sinα = b. Si la première égalité est vraie, on prend θ = α, sinon on prendθ = α. Dans les deux cas, le réel θ construit vérifie les deux égalités mentionnées dans l’énoncé du lemme.□Propriété 5.2. Pour tout complexe z U, il existe un réel θ tel que z = cosθ +isinθ.Démonstration. Soit z = a+ib U avec a et b réels. Par définition de U, a et b vérifient a2 +b2 = 1. Par applicationdu lemme 5.1, il existe θ R tel que a = cosθ et b = sinθ. Ainsi z = cosθ+isinθ.□Propriété 5.3 Réciproque de la propriété 5.2.Tout nombre complexe s’écrivant sous la forme z = cosθ +isinθ avec θ R, appartient à U.Démonstration. C’est évident compte tenu du fait que cos2θ+sin2θ = 1.□Propriété 5.4. Soit la fonction f définie parf : R →Cθ 7→fθ = cosθ +isinθAlorsθ R, fθ = fθ =1fθα,β R, fα fβ = fα+β5. Nombres complexes41
Page 48 : CPI12019/2020AlgèbreDémonstration.— fθ = cosθisinθ = cosθ+isinθ = fθ.—1fθ =fθfθ fθ =fθfθ2 = fθ.— fα fβ = cosα+isinαcosβ+isinβ= cosαcosβsinαsinβ+icosαsinβ+sinαcosβ= cosα+β+isinα+β = fα+βDéfinition 5.4 Exponentielle imaginaire. Compte tenu de l’analogie de la propriété 5.4 avec les propriétés del’exponentielle réelle voire de sa définition, suivant comment l’exponentielle vous a été présentée au lycée, ondéfinit l’exponentielle imaginaire parθ R, eiθ = cosθ+isinθRemarque 5.4. À votre niveau, il faut garder en tête que ceci n’est qu’une notation. Cela n’aurait pas de sens dedire que c’est « e multiplié iθ fois par lui même. » En réalité, ce n’est pas qu’une simple notation, mais la définitionrigoureuse d’une exponentielle réelle ou complexe ou autre n’est pas encore à votre portée.5.2.3. Argument d’un nombre complexePropriété 5.5. Soit z C non nul. Il existe un unique réel ρ 0 et un unique réel θ défini à 2π près tel quez = ρeiθDémonstration. Puisque z est non nul, on peut poser z′ =zz. Nous avons z′ = 1 donc z′ U et d’après la pro-priété 5.2, il existe θ R tel que z′ = eiθ. Ainsi en posant ρ = z 0 nous avons z = ρeiθ. Nous avons montrél’existence de ρ et de θ, il ne reste plus qu’à démontrer l’unicité de ρ et l’unicité à 2π près de θ.Soit z = ρ1eiθ1 = ρ2eiθ2 avec ρ1 0 et ρ2 0. Nous avons 1 = zz = ρ1ρ2 eiθ1θ2. Ainsi en prenant le module :1 =ρ1ρ2 eiθ1θ2 = ρ1ρ2 = ρ1ρ2 . Donc ρ1 = ρ2 et par conséquent eiθ1 = eiθ2 = cosθ1+isinθ1 = cosθ2+isinθ2.Or on sait que deux complexes sont égaux si et seulement si leurs parties réelles et imaginaires respectives sont égales.Ainsi, cosθ1 = cosθ2 et sinθ1 = sinθ2. La première égalité nous donneθ1 = θ2mod 2πouθ1 = θ2mod 2πLa seconde, quant à elle nous donneθ1 = θ2mod 2πouθ1 = πθ2mod 2πLes deux équations réunies nous donnent donc bien θ1 = θ2 mod 2π□Remarque 5.5. On remarque que ρ est nécessairement égal à z. On peut donc tout simplement écrire z = zeiθ.425. Nombres complexes
Page 49 : AlgèbreCPI12019/2020Définition 5.5 Argument. Soit z C non nul, ρ 0 et θ un réel tel que z = ρeiθ.— L’écriture ρeiθ s’appelle la forme trigonométrique ou encore forme exponentielle de z.— Le couple ρ;θ est un couple de coordonnées polaires du point du plan complexe d’affixe z.— Le réel θ est appelé un argument de z et est noté argz. Lorsque θ π;π on parle d’argument principal.Remarque 5.6. Puisque ρ;θ est appelé couple de coordonnées polaires, vous vous doutez bien que le calcul de ρet de θ va être le même que celui vu dans le chapitre de géométrie du plan.Soit z = a+ib = ρeiθ. Alorsa = ρcosθb = ρsinθρ =pa2 +b2cosθ = aρ =aa2 +b2sinθ = bρ =ba2 +b2Propriété 5.6. Soit z et z′ deux nombres complexes non nuls.z = z′ ⇔z =z′ et argz = argz′mod 2πDémonstration. La réciproque est évidente. Le sens direct est quant à lui une conséquence directe de la propriété 5.5.Plus qu’une conséquence, c’est en fait une autre manière d’écrire la propriété 5.5.□Propriété 5.7. Soit z = ρeiθ et z′ = ρ′eiθ′ deux nombres complexes non nuls. Alorszz′ = ρρ′eiθ+θ′zz′ = ρρ′ eiθθ′Démonstration. Les calculs sont simples. Il faut tout de même tenir compte de la propriété 5.4.□5. Nombres complexes43
Page 50 : CPI12019/2020AlgèbrePropriété 5.8. Soit z et z′ deux nombres complexes non nuls.argzz′ = argz+argz′mod 2πarg zz′= argzargz′mod 2πargz = arg1z= argzmod 2πargzn = nargzmod 2πDémonstration. C’est une conséquence directe de la propriété 5.7□5.2.4. Exponentielle complexeDéfinition 5.6 Fonction exponentielle complexe. Soit z = a + ib un nombre complexe avec a et b réels. Onappelle exponentielle complexe de z le nombre complexeez = ea+ib = eaeibLa fonction qui à tout nombre complexe z associe le nombre complexe ez s’appelle fonction exponentielle com-plexe.Propriété 5.9. Soit z et z′ deux nombres complexes de formes algébriques z = a+ib et z′ = a′ +ib′. Alorsargez = b5.1ez = ea5.2ez ̸= 05.3ez+z′ = ezez′5.4ez1 = ez5.5n Z, ezn = enz5.6ez = ez5.7Démonstration.1. ez = eaeib = ea = ea car l’exponentielle réelle est positive.2. ez = ea ̸= 0.3. ez+z′ = ea+a′+ib+b′ def= ea+a′eib+b′ = eaea′eibeib′ = eaeibea′eib′ = ea+ibea′+ib′ = ezez′.4. ezez = ezz = e0 = 1.5. Pour n N, c’est une conséquence par récurrence immédiate de l’équation 5.4. Pour n 0, on appliquesimplement l’équation 5.5 pour avoir n N.6. ez = eaeib = eaeib = ea cosb+isinb= ea cosbisinb = ea cosb+isinb = eaeib = eaib =ez.445. Nombres complexes
Page 51 : AlgèbreCPI12019/2020Propriété 5.10. Soit z et z′ deux complexes. Alorsez = ez′ ⇔z = z′ +2ikπavec k Z ⇔z = z′mod 2iπDémonstration. Posons z = a+ib et z′ = a′ +ib′. D’après la propriété 5.6, nous avonsez = ez′ ⇔ez =ez′ et argez = argez′mod 2π⇔ea = ea′ et b = b′mod 2π⇔a = a′ et b = b′ +2kπavec k Z⇔z = z′ +2ikπavec k ZRemarque 5.7. Faites attention au « i » dans le modulo!5.3. Applications5.3.1. TrigonométriePropriété 5.11 Formules d’Euler. Pour tout réel θ,cosθ = eiθ +eiθ2sinθ = eiθ eiθ2iDémonstration. Il suffit d’écrire eiθ et eiθ puis de faire la somme et la différence pour obtenir les deux formules.□Remarque 5.8. Faites bien attention au « i » qui est au dénominateur de la formule du sinus.Propriété 5.12 Formule de De Moivre. Pour tout réel θ et tout entier naturel n,cosθ +isinθn = cosnθ+isinnθDémonstration. La démonstration est évidente lorsque l’on a remarqué que l’égalité s’écrit avec les exponentiellescomplexes :eiθn= einθIl suffit ensuite d’utiliser la propriété 5.9 pour conclure.□Remarque 5.9. Les formules d’Euler et de De Moivre servent principalement à linéariser ou délinéariser des for-mules de trigonométrie. C’est-à-dire par exemple calculer cos3 θ en fonction de cosθ, cos2θ, cos3θ. . .etsinθ, sin2θ, sin3θ. . .5. Nombres complexes45
Page 52 : CPI12019/2020AlgèbrePropriété 5.13 Factorisation par l’angle moitié. Pour tout réel θ R :eiθ +1 = ei θ2ei θ2 +ei θ2= 2ei θ2 cosθ2eiθ 1 = ei θ2ei θ2 ei θ2= 2iei θ2 sinθ2Démonstration. Il suffit de factoriser eiθ +1 par ei θ2 !□Remarque 5.10. Il existe en fait une formule plus générale :eix +eiy = 2ei x+y2 cosxy2L’avantage de la forme exponentielle est qu’elle permet de faire très facilement des calculs de trigonométrie. Ainsivous pouvez très facilement démontrer les formules suivantes avant de les apprendre par cœur :Propriété 5.14 Formulaire de trigonométrie.cosa+b = cosacosbsinasinbsina+b = sinacosb+cosasinbtana+b = tana+tanb1tanatanbcos2a = cos2asin2a = 2cos2a1 = 12sin2asin2a = 2sinacosatan2a =2tana1tan2acosa = 1tan2 a21+tan2 a2sina =2tan a21+tan2 a2tana =2tan a21tan2 a2cosa+cosb = 2cosa+b2cosab2cosacosb = 2sina+b2sinab2sina+sinb = 2sina+b2cosab2sinasinb = 2cosa+b2sinab2Démonstration. À vous de la faire.□465. Nombres complexes
Page 53 : AlgèbreCPI12019/2020Propriété 5.15. Soit a et b deux réels non tous les deux nuls. Il existe un réel strictement positif A et un réel ϕ telque pour tout x R,acosx+bsinx = AcosxϕDémonstration. On pose z = a + ib. Puisque a et b ne sont pas tous les deux nuls, z est non nul et il peut s’écriresous forme trigonométrique : z = Aeiϕ= a+ib. Par identification des parties réelles et imaginaires, on en déduit quea = Acosϕ et b = Asinϕ. En remplaçant dans l’expression de départ, on obtient Acosxcosϕ+sinxsinϕ,qui est égal à Acosxϕ.□Remarque 5.11. La propriété 5.15 est souvent utilisée en physique lorsque l’on étudie par exemple un signal élec-trique ou autre qui peut se décomposer comme somme de deux signaux. Dans ce contexte, A est l’amplitude du signalet ϕ le décalage de phase. Pour déterminer A et ϕ il suffit de suivre la démonstration précédente : on met z = a+ ibsous forme trigonométrique : z = Aeiϕ.5.3.2. Équations du second degré dans CDéfinition 5.7 Racine carrée. Soit z C un nombre complexe. On appelle racine carrée de z un complexe Zvérifiant Z2 = z.Propriété 5.16. Tout nombre complexe non nul possède exactement deux racines carrées. De plus ces deux racinescarrées sont opposées l’une de l’autre.Démonstration. Soit z = ρeiθ ̸= 0. Posons Z0 = ρei θ2 . Nous avons bien Z20 = z. Ainsi z possède au moins une racinecarrée. De plus Z02 = Z20 = z. Donc z possède au moins 2 racines carrées opposées. Montrons que ce sont les deuxseules.Prenons deux racines carrées quelconques de z, Z1 et Z2. Nous avons donc Z21 = Z22 c’est-à-dire Z1 Z2Z1 +Z2 =0. Or dans C, un produit de facteurs est nul si et seulement si l’un des facteurs est nul on pourrait le démontrerrigoureusement en utilisant le fait que zz′ = zz′ et qu’un complexe est nul si et seulement si son module est nul.Ainsi Z1 = Z2 ou Z1 = Z2.Les deux seules racines possibles sont donc Z0 et Z0.□Remarque 5.12. Il est strictement INTERDIT d’utiliser le symbole pour un autre nombre qu’un réel positif.En effet, pour un réel strictement positif, il existe deux racines, l’une positive, l’autre négative. Il est donc aisé dedécider que l’on note celle qui est positive l’autre étant alors .Par contre, pour un nombre complexe, il existe deux racines que l’on ne peut pas distinguer aussi facilement ellessont certes opposées, mais la notion de positivité n’a pas de sens dans C.Un exemple simple qui devrait vous faire passer l’envie d’utiliser le symbole sur un nombre complexe est lesuivant :1def=12=1×1 =p1×1 =1 = 1Remarque 5.13.5. Nombres complexes47
Page 54 : CPI12019/2020Algèbre— Le complexe nul 0 ne possède qu’une seule racine carrée : 0.— Si z R+, ses deux racines carrées sont données par z et z.— Si z R, ses deux racines carrées sont données par iz et iz. Cela se vérifie aisément en élevant aucarré :iz2 = i2z = z = z.En pratique, comment calculer les deux racines carrées d’un complexe quelconque?1. Si z peut se mettre sous la forme trigonométrique z = ρeiθ, alors l’une des racines est donnée parZ = ρei θ22. Si z ne peut pas se mettre sous la forme trigonométrique, on est obligé de travailler avec la forme algébrique :z = a+ib. Posons Z = A+iB une racine. On a alorsZ2 = zReZ2= RezImZ2= ImzCe qui veut dire queA2 +B2 =a2 +b2A2 B2 = a2AB = bEn pratique on utiliseA2 +B2 =a2 +b2A2 B2 = aAB est du signe de bEn additionnant et soustrayant les deux premières lignes, on trouve A2 et B2, c’est-à-dire A et B au signe près. Latroisième ligne nous permet de savoir si A et B sont de même signe ou pas.Plutôt que d’apprendre mal cette formule que vous oublierez trop vite, comprenez et retenez surtout la méthodequi est aisée à retenir puisque très logique.Théorème 5.6 Résolution d’une équation du second degré. Soit a, b et c trois nombres complexes avec a ̸= 0.Considérons l’équation d’inconnue z Caz2 +bz+c = 0Notons le discriminant de l’équation = b2 4acOn a :— Si = 0, l’équation admet une racine double z0 donnée parz0 = b2a— Si ̸= 0 et si δ désigne une des deux racines carrées de , alors l’équation admet deux racines distinctesz1 et z2 données par :z1 = bδ2az2 = b+δ2a485. Nombres complexes

Page 55 : AlgèbreCPI12019/2020Démonstration. Soit z C une solution de l’équation . Puisque a ̸= 0, nous pouvons écrire le trinôme sous formecanonique0 = az2 + baz+ ca= a"z+ b2a2b2 4ac4a2En notant Z = z+ b2a, on doit avoir Z2 =4a2— Si = 0, alors Z = 0, c’est-à-dire z = b2a.— Si ̸= 0, en notant δ une racine carrée complexe de ,Z δ2aZ + δ2a= 0, c’est-à-dire Z = ± δ2a ou encorez = bδ2aou z = b+δ2a .On vérifie dans chacun des cas précédents que z est effectivement solution de l’équation.□5.3.3. Racines n-ièmesDéfinition 5.8 Racine n-ième de l’unité.Soit n N.— On appelle racine n-ième de l’unité un complexe Z tel que Zn = 1.— On note Un l’ensemble des racines n-ièmes de l’unité :Un = z C / zn = 1Propriété 5.17. Soit n Net ω1 = e2iπn . Il y a exactement n racines n-ièmes de l’unité. Elles sont données par lespuissances de ω1 : ωk1 où k J0;n1K.Un =nωk1 / k J0;n1Ko=ne2ikπn / k J0;n1KoDémonstration. Soit Z C tel que Zn = 1. En prenant le module, on en déduit que Z = 1. Il existe donc un uniqueréel θ 0;2π tel que Z = eiθ. Mais puisque e0 = 1 = Zn = einθ, on doit avoir nθ = 0 mod 2π, c’est-à-dire nθ = 2kπavec k Z, ou encore θ = 2kπn avec k Z. Comme on veut que θ soit dans l’intervalle 0;2π, on doit avoir 0 k n,d’où k J0;n1K. Ainsi Z = e2ikπn = ωk1.Réciproquement, tout complexe de cette forme vérifie bien Zn = 1.Étant donné que les exponentielles obtenues sont toutes distinctes, nous avons bien exactement n racines n-ièmesde l’unité.□Remarque 5.14. D’un point de vue géométrique, on peut constater que les n racines n-ièmes sont les affixes dessommets du polygone régulier à n côtés, centré en O et dont l’un des sommets est le point d’affixe 1.Propriété 5.18. Soit n 2. La somme des racines n-ièmes de l’unité est nulle. C’est-à-dire, si ω1 = e2iπn alors1+ω1 +ω21 +···+ωn11=n1k=0ωk1 = zUnz = 05. Nombres complexes49

Page 56 : CPI12019/2020Algèbre1jja n = 31i1ib n = 41e2iπ5e4iπ5e6iπ5e8iπ5c n = 511jeiπ3je5iπ3d n = 6FIGURE 5.1. – Racines n-ièmes de l’unité.Démonstration. C’est la somme des n premiers termes d’une suite géométrique de raison ω1 ̸= 1 avec ωn1 = 1.□Définition 5.9 Racine n-ième.Soit n Net z C non nul. On appelle racine n-ième de z un complexe Z tel queZn = zPropriété 5.19. Soit n Net z C non nul avec z = ρeiθ et ρ 0. Le complexe z admet n racines n-ièmes donnéesparZk = ρ1n ei θ+2kπn = ρ1n ei θn ωk1k J0;n1Koù ω1 = e2iπn .Démonstration. Notons Z0 = ρ1n eiθn . On a bien Zn0 = z. Par conséquent, Zn = z si et seulement siZZ0n= 1, c’est-à-dire si et seulement si ZZ0 est une racine n-ième de l’unité.□Remarque 5.15. Il faut retenir de la propriété 5.19, d’abord qu’il y a exactement n racines n-ièmes d’un complexenon nul, mais aussi qu’elles s’obtiennent en multipliant une solution particulière par les racines n-ièmes de l’unité.Remarque 5.16. Résolution de zn = λ Pour résoudre l’équation zn = λ d’inconnue z, avec λ C, il faut écrire λsous forme trigonométrique. Il n’existe malheureusement pas de méthode générale permettant de la résoudre dans lecas où λ est sous forme algébrique, comme nous avons pu le voir à la section 5.3.2 dans le cas n = 2.5.3.4. Géométrie5.3.4.1. TranslationsRemarque 5.17. Soit u C et →u le vecteur d’affixe u. L’application tu : C→Cz7→z+ucorrespond, géométri-quement à la translation de vecteur →u .505. Nombres complexes
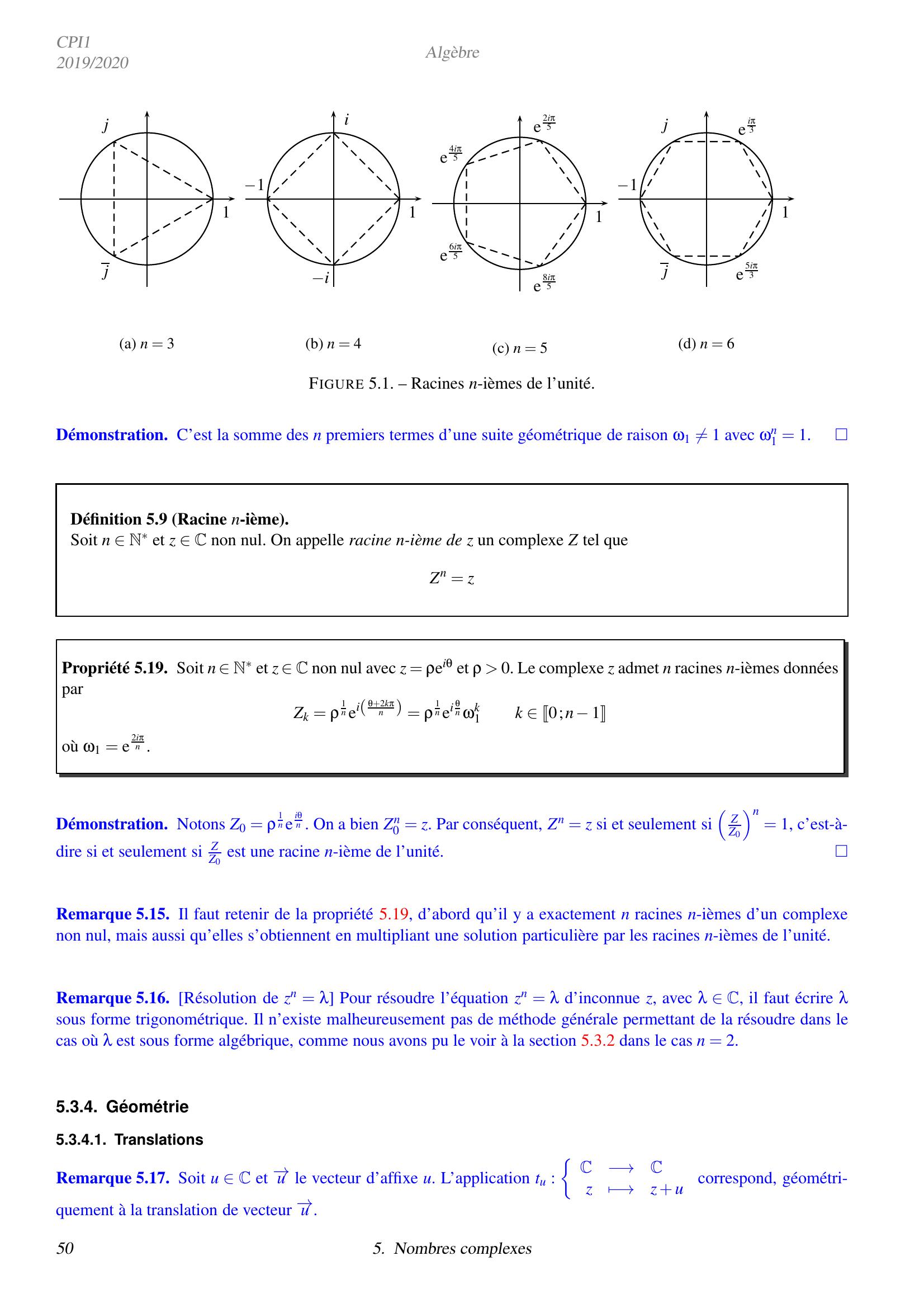
Page 57 : AlgèbreCPI12019/20205.3.4.2. Symétries centralesRemarque 5.18. L’application SO : C→Cz7→zcorrespond, géométriquement à la symétrie de centre O.Propriété 5.20. Soit ω C et Ωle point d’affixe ω. L’application Sω : C→Cz7→2ωz correspond, géométri-quement à la symétrie de centre Ω.Démonstration. Soit M le point d’affixe z. Si N est l’image de M par la symétrie de centre Ω, alors →ΩM = →NΩ. D’où,en notant x l’affixe de N, zω = ωx, ce qui équivaut à x = 2ωz = Sωz.□5.3.4.3. Symétries AxialesRemarque 5.19.— L’application Sx : C→Cz7→zcorrespond, géométriquement à la symétrie d’axe Ox.— L’application Sx : C→Cz7→zcorrespond, géométriquement à la symétrie d’axe Oy.5.3.4.4. Homothéties et RotationsRemarque 5.20.— Soit λ R. L’application Hλ : C→Cz7→λz correspond, géométriquement, à l’homothétie de centre O et derapport λ.— Soit θ R. L’application Rθ : C→Cz7→eiθz correspond, géométriquement, à la rotation centre O et d’angleθ.— Soit ω = ρeiθ C. L’application HRρθ : C→Cz7→ωzcorrespond, géométriquement, à la composée de larotation centre O et d’angle θ et de l’homothétie de rapport ρ quelque soit l’ordre de la composition.Propriété 5.21. Soit ω C,λ R,θ R et Ωle point d’affixe ω.— L’application Hω,λ : C→Cz7→ω+λzω correspond, géométriquement, à l’homothétie de centre Ωetde rapport λ.— L’application Hω,λ : C→Cz7→ω+eiθzωcorrespond, géométriquement, à la rotation de centre Ωetd’angle θ.Démonstration. Avec les même notations que précédemment, si N est l’image de M par l’homothétie de centre Ωetde rapport λ, alors ΩN = λΩM.Pour la rotation, l’écriture est moins simple, mais un schéma nous permet de voir les choses.□5. Nombres complexes51
Page 58 : CPI12019/2020Algèbre5.3.4.5. Cas généralNous voyons que dans tous les cas, les applications considérées sont de la forme f : z 7→az+b ou f : z 7→az+b, aveca,b C et a ̸= 0. Réciproquement, est-ce que les applications de cette forme sont des symétries/rotations/translations?Puisque l’application conjuguée est une symétrie axiale, nous pouvons nous contenter d’étudier la première forme :Soit a ̸= 0, b deux complexes, θ = arga et f : z 7→az+b.— Si a = 1, alors f est la translation de vecteur b.— Si a ̸= 1, alors f possède un unique point fixe : fω = ω ⇔ω =b1a. On peut alors écrire f sous une formeplus simple : fzω = az+baω+b = azω = aeiθzω = eiθ azω.On voit alors que f est la composée de la rotation de centre ω et d’angle θ et de l’homothétie de centre ω et derapport a.Théorème 5.7 Interprétation de zbza. Soit a,b,z C avec z ̸= a et z ̸= b. On note A,B,M, les points d’affixesa,b,z. Alorszbza = MBMA;argzbza→MA,→MBmod 2πDémonstration. Nous avons arg zbzaargbzazargbzargaz →i ,→MB→i ,→MA→MA,→MBmod 2π. Donc zbza = bzeiβazeiα = MBMAeiβα = MBMAei→MA,→MB.□Corollaire 5.1. Soit A,B,M trois points du plan d’affixes a,b,m, avec A ̸= M. Alors— A,B,M sont alignés si et seulement si→MA,→MB0 mod π, si et seulement si zbza R.— Les droites AM et BM sont orthogonales si et seulement si→AM,→BMπ2 mod π, si et seulement sizbza iR.Démonstration. Il suffit de reprendre le théorème et de remarquer que les réels sont les complexes d’arguments 0 ouπ et que les imaginaires purs sont les complexes d’arguments π2 ou π2.□525. Nombres complexes

Page 59 : 6. PolynômesNote : Dans ce chapitre nous travaillerons à la fois sur R et sur C. Afin d’alléger l’écriture, nous utiliserons la lettreK pour désigner R ou C. Ainsi une propriété ou une définition qui est valable à la fois sur R et sur C sera énoncée surK.6.1. Polynômes à une indéterminée6.1.1. DéfinitionsDéfinition 6.1 Scalaire. On appelle scalaire un élément de K.Définition 6.2 Polynôme. On appelle polynôme d’indéterminée X à coefficients dans K une expression de laforme :P = PX = a0 +a1X +···+anXn =nk=0akXkoù a0,a1,...,an sont des éléments de K et sont appelés coefficients de PX.On note KX l’ensemble des polynômes à coefficients dans K.Remarque 6.1. Attention! L’objet X est un objet mathématique bien précis que l’on appelle indéterminée. Ce n’estni une valeur ni une variable.Définition 6.3 Vocabulaire. On appelle :— polynôme constant un polynôme de la forme PX = a0 avec a0 K.— polynôme unité le polynôme PX = 1.— polynôme nul le polynôme PX = 0.— monôme un polynôme de la forme PX = akXk avec ak K.Remarque 6.2. Tous les coefficients du polynôme nul sont nuls. Réciproquement, tout polynôme ayant tous sescoefficients nuls est le polynôme nul.53
Page 60 : CPI12019/2020AlgèbreDéfinition 6.4 Opérations. Soit PX =nk=0akXk et QX =mk=0bkXk deux polynômes de KX et λ K unscalaire.On définit les polynômes :— λPX =nk=0λakXk— P+QX =maxn;mk=0ckXk où ck = ak +bk, en convenant que ak = 0 si k n et bk = 0 si k m.— P×QX =n+mk=0ckXk où ck = i+ j=kaibj =ki=0aibki, en convenant que ak = 0 si k n et bk = 0 si k m.— P◦QX =nk=0akQkX.Remarque 6.3. C’est tout à fait cohérent avec ce que vous connaissez depuis le lycée sur les fonctions polynômiales.Propriété 6.1. Soit PX, QX et RX, trois polynômes de KX. On a alors :P+QX = Q+PXla somme est commutativeP×QX = Q×PXle produit est commutatifP+Q+RX = P+Q+RXla somme est associativeP×Q×RX = P×Q×RXle produit est associatifP×Q+RX = P×QX+P×RXle produit est distributif par rapport à l’additionDémonstration. En exercice.□6.1.2. Degré d’un polynômeDéfinition 6.5 Degré. Soit PX =nk=0akXk un polynôme non nul de KX. On appelle degré de PX et onnote degP le plus grand indice k J0;nK tel que ak ̸= 0.Par convention on pose deg0 = .On note KnX l’ensemble des polynômes de KX de degré inférieur ou égal à n.Définition 6.6 Vocabulaire. On appelle :— Coefficient dominant le coefficient du monôme de plus haut degré de PX.— Polynôme unitaire ou normalisé un polynôme de coefficient dominant égal à 1.546. Polynômes
Page 61 : AlgèbreCPI12019/2020Propriété 6.2. Soit PX et QX deux polynômes de KX. On a alors :1. degP+Q maxdegP;degQ2. degP×Q = degP+degQ3. degP◦Q = degP×degQDémonstration.1. Si P = 0 ou Q = 0, la propriété est évidente. Si P ̸= 0 et Q ̸= 0, on pose PX =nk=0akXk etQX =mk=0bkXk. Si k maxn;m alors ck = ak +bk = 0. Ainsi le plus grand indice k tel que ck = ak +bk estnon nul, est forcément inférieur ou égal à maxn;m. Ainsi degP+Q maxn;m.2. Si P = 0 ou Q = 0, la propriété est évidente. Si P ̸= 0 et Q ̸= 0, on pose PX =nk=0akXk et QX =mk=0bkXkavec an ̸= 0 et bm ̸= 0, et on pose ck =ki=0aibki.Soit k n+ m. Puisque pour tout i n, ai = 0 et pour tout i n, k i n+ m i m donc bki = 0, on endéduit que ck = 0.Ainsi, le degré de P×QX est forcément inférieur ou égal à n+m. Orcn+m = a0 bn+mz=0+a1 bn+m1 z =0+···+an1 bm+1z=0+anbm +an+1z=0bm1 +···+am+nz=0b0cn+m = anbm ̸= 0Le degré est donc exactement égal à n+m.3. P ◦QX =nk=0akQkX. Or degQXk= kdegQ en appliquant k 1 fois le point précédent d’où laconclusion.Remarque 6.4.— Si degP ̸= degQ alors degP + Q = maxdegP;degQ. En effet les termes dominants ne peuvent pass’éliminer entre eux.— Si degP+Q maxdegP;degQ alors degP = degQ et les coefficients dominants sont opposés.Propriété 6.3. Deux polynômes sont égaux si et seulement si tous leurs coefficients correspondants aux monômesde mêmes degrés sont égaux. Dans ce cas les deux polynômes sont de même degré.Démonstration. Soit PX =nk=0akXk et QX =mk=0bkXk. Alors PX = QX ⇔PQX = 0 ⇔tous les coef-ficients de PQX sont nuls ⇔k J0;maxn;mK, ak bk = 0 ⇔k J0;maxn;mK, ak = bk.Pour k Jminn;m+1;maxn;mK, on a soit ak = 0, soit bk = 0, donc ak = bk = 0. Les deux polynômes ont doncbien le même degré.□6. Polynômes55

Page 62 : CPI12019/2020Algèbre6.2. Dérivation6.2.1. Polynôme dérivéDéfinition 6.7 Polynôme dérivé. Soit PX =nk=0akXk un polynôme. On appelle polynôme dérivé de PX,noté P′X, le polynôme défini par :P′X =0si degP 0nk=1kakXk1 = a1 +2a2X +···+nanXn1si degP 1On définit par récurrence les polynômes dérivés successifs parP0X = PXk N,PkX =Pk1′ XPropriété 6.4. Soit PX KX un polynôme, alorsdegP′ = degP1si degP 1sidegP 0Démonstration. Cela vient tout simplement de la définition de la dérivée.□Propriété 6.5. Soit PX et QX deux polynômes de KX et λ un scalaire de K. Alors :1. P+Q′X = P′ +Q′X2. λP′X = λP′X3. P×Q′X = P′ ×Q+P×Q′XDémonstration. Cela vient là aussi tout simplement des définitions des sommes et produits de polynômes.□6.2.2. Dérivées d’ordre supérieurPropriété 6.6 Formule de Leibniz. Soit PX et QX deux polynômes de KX et n N. AlorsP×QnX =nk=0nkPk ×QnkXDémonstration. La démonstration se fait par récurrence : La formule est évidente lorsque n = 0; Pour l’hérédité,c’est un jeu de changement d’indice et d’application de la formule de Pascal que vous connaissez bien évidemmentpar cœur.□566. Polynômes
Page 63 : AlgèbreCPI12019/2020Théorème 6.1 Formule de Taylor en 0. Soit PX un polynôme de degré n, alors :PX = P0+P′0X + P′′02!X2 +···+ Pn0n!Xn =nk=0Pk0k!XkRemarque 6.5. Rien ne vous choque dans cette formule? Nous n’avons pas défini ce que voulait dire P0! Eneffet, on a bien précisé dans la remarque 6.1 que X n’était ni une variable ni une valeur. Alors que représente ceP0? En fait, nous pouvons démontrer qu’il existe un lien bijectif entre le polynôme PX =nk=0akXk et la fonctionpolynômiale ˜P : x 7→nk=0akxk. Ainsi, on va pouvoir confondre et on ne va pas s’en priver! les polynômes et lesfonctions polynômiales en notant abusivement P au lieu de ˜P. Donc P0 est en fait égal à ˜P0 = a0.Démonstration. Par récurrence, vous pouvez montrer aisément que Pk0 = k!ak.□Corollaire 6.1 Formule de Taylor en α. Soit PX un polynôme de degré n et α K, alors :PX = Pα+P′αX α+ P′′α2!X α2 +···+ Pnαn!X αn =nk=0Pkαk!X αkDémonstration. On applique la formule de Taylor en 0 théorème 6.1 au polynôme QX = PX +α.□6.3. Arithmétique dans KX6.3.1. DivisibilitéDéfinition 6.8 Divisibilité. Soit AX et BX deux polynômes. On dit que AX divise BX dans KX, eton note AB si et seulement si il existe CX KX tel que BX = A×CX.Le polynôme AX est appelé diviseur de BX et BX un multiple de AX.Remarque 6.6.1. Un polynôme PX non nul est divisible par les polynômes λ et λPX avec λ K.2. Réciproquement, un polynôme de degré 0 polynôme constant et non nul divise tous les polynômes.3. Tout polynôme divise le polynôme nul.Définition 6.9 Polynômes associés. Soit PX et QX deux polynômes de KX. On dit que PX et QXsont associés si et seulement si il existe un scalaire non nul λ Ktel que PX = λQX.6. Polynômes57
Page 64 : CPI12019/2020AlgèbrePropriété 6.7. Soit AX, BX, CX, DX quatre polynômes de KX et n N. On a :1. AA2. ABBC⇒AC3. AB ⇒AB×C4. ABAC⇒AB+C5. ACBD ⇒A×BC ×D6. AB ⇒AnBnDémonstration. Laissée en exercice.□Propriété 6.8. Soit PX et QX deux polynômes non nuls. AlorsPQ et QP ⇔λ K, PX = λQX ⇔PX et QX sont associésDémonstration.⇒Puisque PX divise QX, il existe un polynôme non nul RX tel que QX = PXRX.D’où degQ degP. De même, puisque QX divise PX, on a degP degQ. Finalement, degP =degQ et degR = 0. D’où RX est un polynôme constant RX = λ et QX = λPX.⇐Évident.Propriété 6.9. Soit A et B deux polynômes. Alors AB = 1 si et seulement si A et B sont constants et inverse l’un del’autre.Démonstration.⇐Évident.⇒Nécessairement A et B sont non nuls. Ainsi degA+degB = 0 donc degA = degB = 0. Ce sont donc despolynômes constants inverses l’un de l’autre.Remarque 6.7. Cela veut dire qu’un polynôme non nul n’est pas forcément inversible. Les seuls polynômes inver-sibles sont les constantes non nulles.6.3.2. Division euclidienneThéorème 6.2 Division euclidienne. Soit AX et BX deux polynômes de KX tels que BX ̸= 0. Alors ilexiste un unique couple de polynômes QX;RX KX×KX tel que AX = B×QX+RXdegR degBLes polynômes QX et RX sont respectivement appelés quotient et reste de la division euclidienne de AX parBX.Démonstration. Les détails de la démonstration sont laissés en exercice.586. Polynômes
Page 65 : AlgèbreCPI12019/2020Unicité si existence : On pose AX = B×QX+RX = B×Q′X+R′X. On démontre alors que degB+degQQ′ degB ce qui permet de conclure.Existence : Si degA degB alors QX = 0 et RX = AX conviennent. Si degA degB on fait unerécurrence forte sur le degré de AX. Pour l’hérédité, en notant an+1Xn+1 et bmXm les termes dominants deAX et BX, il faut s’appuyer sur le polynôme AXBX× an+1bm Xn+1m qui est de degré inférieur ou égalà n.Corollaire 6.2. Soit PX et QX deux polynômes de KX. Alors PQ si et seulement si le reste de la divisioneuclidienne de QX par PX est nul.Exemple 6.1. Voyons concrètement comment on fait une division euclidienne entre deux polynômes. Il faut pourcela se rappeler comment vous faisiez les divisions euclidiennes en primaire.Nous allons faire la division euclidienne de 2X4 +X3 X2 +X +1 par 2X2 X 2, en utilisant la techniquedite « division selon les puissances décroissantes », c’est-à-dire en éliminant au fur et à mesure les monômes deplus haut degré.2X4 +X3 X2 +X +1 = X22X2 X 2+2X3 +X2 +X +1= X22X2 X 2+X2X2 X 2+2X2 +3X +1= X22X2 X 2+X2X2 X 2+12X2 X 2+4X +3= 2X2 X 2X2 +X +1zQuotient+4X +3 z ResteOn représente cela ainsi :2X4+X3X2+X+12X2 X 22X4X32X2X2 +X +12X3+X2+X2X3X22X2X2+3X+12X2X24X+36.4. Racines d’un polynôme6.4.1. RacinesDéfinition 6.10 Racine. Soit PX KX. On dit que α K est une racine ou un zéro de PX si Pα = 0.Théorème 6.3. Soit PX KX et α K. Alorsα est un zéro de PX ⇔PX est divisible par X α6. Polynômes59

Page 66 : CPI12019/2020AlgèbreDémonstration.⇒La division euclidienne de PX par X α donne PX = QXX α+RX avec degR 1, donc RX = λ avec λ K. D’où Pα = 0 = λ et X αP.⇐Nous avons PX = X αQX donc Pα = ααQα = 0, et α est une racine de PX.□Définition 6.11 Ordre de multiplicité. Soit PX KX un polynôme non nul et α une racine de PX. Ondéfinit l’ordre de multiplicité de α comme étant le plus grand entier m tel que X αm divise PX.Remarque 6.8. Grâce au théorème 6.3 nous pouvons affirmer que m 1. De plus, puisque X αm divise PXnous avons aussi m degP. Donc finalement 1 m degP.Propriété 6.10. Soit PX KX, α K et k 1 un entier. AlorsX αk divise PX ⇔Pα = P′α = ··· = Pk1α = 0Démonstration.⇐D’après la formule de Taylor en α corollaire 6.1, nous avonsPX = X αk"ni=kPiαi!X αik⇒Par contraposée, toujours en utilisant la formule de Taylor en α. Si P jα ̸= 0 pour un certain 0 j k 1,alors QX =k1i=0Piαi!X αi est un polynôme non nul de degré strictement inférieur à k, il ne peut donc pasêtre divisible par X αk. Or le polynôme P QX est divisible par X αk, donc PX ne peut pas êtredivisible par X αk.Théorème 6.4. Soit PX KX, α K et m 1 un entier. Alors α est une racine de multiplicité m de PX si etseulement si Pα = P′α = ··· = Pm1α = 0 et Pmα ̸= 0.Démonstration. Cela découle tout simplement de la définition de la multiplicité d’une racine et de la propriété 6.10.□6.4.2. Nombre de racinesPropriété 6.11. Soit PX KX et α1, . . ., αp, p racines distinctes de PX. Alors P est divisible parX α1X α2...X αp.Démonstration. Par récurrence :— La propriété est vraie pour p = 1.606. Polynômes

Page 67 : AlgèbreCPI12019/2020— Supposons qu’elle soit vraie pour p 1 et montrons la au rang p+ 1. Par hypothèse de récurrence, PX estdivisible par X α1...X αp, donc PX = X α1...X αpQX.Or Pαp+1 = 0 = αp+1 α1z̸=0...αp+1 αpz̸=0Qαp+1. On en déduit que αp+1 est une racine de QX et doncQX est divisible par X αp+1 et par conséquent PX est divisible par X α1...X αp+1.Propriété 6.12. Soit PX KX et α1, . . ., αp, p racines distinctes de PX de multipicité respectives m1, . . .mp.Alors PX est divisible par X α1m1X α2m2 ...X αpmp.Démonstration. Admis.□Corollaire 6.3. Un polynôme non nul de degré n possède au plus n racines comptées avec leur ordre de multiplicité.Démonstration. D’après la propriété 6.12, PX est divisible par QX = X α1m1 ...X αpmp de degré degQ =m1 +···+mp. Donc si PX est non nul, m1 +···+mp degP.□Corollaire 6.4. Un polynôme de degré au plus n admettant plus de n racines distinctes est le polynôme nul.Démonstration. C’est la contraposée du corollaire 6.3.□Corollaire 6.5. Un polynôme admettant une infinité de racines distinctes est nul.Démonstration. La démonstration du corollaire du corollaire du corollaire devrait être à votre niveau. . .6.5. Décomposition en facteurs irréductibles6.5.1. Polynôme irréductibleDéfinition 6.12 Polynôme irréductible. Soit PX KX. On dit que PX est irréductible s’il est de degrésupérieur ou égal à 1 et si ses seuls diviseurs sont les polynômes λ et λPX avec λ Kc’est-à-dire les poly-nômes constants non nuls et les polynômes associés à PX.Remarque 6.9.— Un polynôme de degré 1 est forcément irréductible.— Un polynôme de degré supérieur ou égal à 2 qui possède une racine est forcément réductible.6. Polynômes61
Page 68 : CPI12019/2020AlgèbreThéorème 6.5. Tout polynôme de KX de degré supérieur ou égal à 1 se décompose de manière unique en produitd’une constante non nulle et de polynômes irréductibles unitaires à l’ordre des facteurs près.Démonstration. Hors programme.□Définition 6.13 Polynôme scindé. Soit PX KX. On dit que PX est scindé dans K si et seulement si c’estun produit de polynômes de degré 1 de KX.6.5.2. Décomposition dans CXLa décomposition d’un polynôme dépend de K. Nous allons donc distinguer les décompositions sur CX et surRX.Théorème 6.6 de D’Alembert-Gauss ou théorème fondamental de l’algèbre. Tout polynôme de CX de de-gré supérieur ou égal à 1 admet au moins une racine dans C.Démonstration. Hors programme.□Remarque 6.10. Vous remarquerez que le théorème 6.6 n’est pas énoncé dans K mais dans C. En effet, vous savezque dans R il est faux : 1+X2 ne possède pas de racines dans R.Corollaire 6.6. Les polynômes irréductibles de CX sont les polynômes de degré 1.Démonstration. Nous avons déjà vu que les polynômes de degré 1 étaient forcément irréductibles. Ensuite, parcontraposée du théorème de D’Alembert-Gauss théorème 6.6 un polynôme irréductible est forcément de degré 1.□Corollaire 6.7. Tout polynôme PX CX peut s’écrire sous la formePX = λX α1m1X α2m2 ...X αpmpavec λ C et α1,. . .,αp des complexes distincts.Démonstration. Nous avons vu dans le théorème 6.5 que tout polynôme se décomposait en produit de polynômesirréductibles. Or d’après le corollaire 6.6 les polynômes irréductibles de CX sont les polynômes de degré 1.□Remarque 6.11. Le corollaire 6.7 revient à dire que tous les polynômes non nuls de CX sont scindés.De plus la somme des multiplicités est égale au degré de PX si PX est non nul.626. Polynômes
Page 69 : AlgèbreCPI12019/20206.5.3. Décomposition dans RXPassons maintenant à la décomposition dans RX.Lemme 6.1. Soit PX RX. Si on considère PX comme un polynôme de CX et que α C \R est une racinede PX alors α est aussi une racine complexe de PX avec même multiplicité.Démonstration. Puisque les coefficients de PX sont réels, on remarque que Pα = Pα donc α est une racine.□Propriété 6.13. Les polynômes irréductibles de RX sont les polynômes de degré 1 et les polynômes de degré 2n’admettant pas de racine réelle discriminant strictement négatif.Démonstration. Il est clair que les polynômes de degré 1 et de degré 2 à discriminant strictement négatif sont irré-ductibles dans RX. Reste à montrer que les polynômes de degré 2 à discriminant positif ou nul et de degré supérieurou égal à 3 sont réductibles.Nous savons déjà qu’un polynôme de degré 2 à discriminant positif ou nul possède 2 racines réelles, il est donc ré-ductible dans RX.Si PX est de degré supérieur ou égal à 3, il possède au moins une racine α dans C. Si α R, alors PX estréductible, sinon d’après le lemme 6.1, α ̸= α est aussi une racine. Le polynôme PX est donc divisible parX αX α = X2 α+αX +αα= X2 2ReαX +α2 RXLe polynôme PX n’est donc pas irréductible.□Propriété 6.14. Tout polynôme PX RX peut s’écrire sous la formePX = λX α1m1X α2m2 ...X αpmpX2 +β1X +γ1n1X2 +β2X +γ2n2 ...X2 +βqX +γqnqAvec λ R, α1,. . ., αp des réels distincts et β1,. . ., βq, γ1,. . ., γq des réels tels que pour tout k J1;qK, β2k 4γk 0.Démonstration. Là encore cela découle directement du théorème 6.5 et de la propriété 6.13.□6.6. Somme et produit des racines d’un polynômePropriété 6.15 Somme et produit des racines d’un polynôme scindé. Soit PX KX un polynôme scindésur K de degré n 1. On note PX = a0 +a1X +···+anXn = λX α1X α2...X αn. Alorsα1 +α2 +···+αn = an1anα1α2 ...αn = 1n a0an6. Polynômes63
Page 70 : CPI12019/2020AlgèbreDémonstration. Il suffit de développer le produit et d’identifier les coefficients. Le terme constant a0 est égal à1nλ, le terme dominant an est égal à λ et le terme de degré n1 an1 est égal à λα1 +···+αn.□Remarque 6.12. Pour n = 2 on retrouve la formule censée être connue : x1 + x2 = S = ba, x1x2 = P = ca. Ainsi,résoudre le système α+β=Sα×β=Previent à déterminer les solutions deX2 SX +P = 0646. Polynômes

Page 71 : 7. Fractions RationnellesNote : Dans ce chapitre nous travaillerons à la fois sur R et sur C. Afin d’alléger l’écriture, nous utiliserons la lettreK pour désigner R ou C. Ainsi une propriété ou une définition qui est valable à la fois sur R et sur C sera énoncée surK.Le début de ce chapitre contient des choses qui peuvent sembler « évidentes » car vous les utilisez depuis tout petitavec les fractions. En effet, les fractions rationnelles sont aux polynômes ce que les nombres rationnels Q sont auxentiers relatifs Z. Mais vous l’avez déjà remarqué, en maths on aime être rigoureux et poser clairement les choses,mêmes si elles semblent simples.7.1. Ensemble des fractions rationnelles7.1.1. Fractions rationnellesDéfinition 7.1 Fraction rationnelle. On appelle fraction rationnelle d’indéterminée X un « quotient » de deuxpolynômes P et Q de KX.On note KX l’ensemble des fractions rationnelles et F = PQ un élément de KX.Définition 7.2 Égalité de deux fractions. On dit que deux fractions rationnelles F1 = P1Q1 et F2 = P2Q2 sont égalessi et seulement si P1Q2 = P2Q1.Remarque 7.1. Tout comme un entier peut être considéré comme un rationnel en écrivant n = n1, un polynôme deKX peut être considéré comme une fraction rationnelle de KX en l’écrivant P = P1 .Définition 7.3 Forme irréductible. Soit F KX une fraction rationnelle. On appelle forme irréductible deF toute écriture de la forme F = AB avec A et B deux polynômes premiers entres eux. Une telle écriture est toujourspossible et unique à multiplications près par des scalaires non nuls.7.1.2. OpérationsDéfinition 7.4 Opérations. Soit F1 = P1Q1 et F2 = P2Q2 deux fractions rationnelles et λ un réel. On définit :λF1 = λP1Q1F1 +F2 = P1Q2 +P2Q1Q1Q2F1 ×F2 = P1P2Q1Q2F1F2= P1Q2Q1P265

Page 72 : CPI12019/2020AlgèbreRemarque 7.2.— Lorsque l’on définit quelque chose il faut vérifier que c’est bien défini !!!. Nous avons défini la somme etle produit à partir de P1 et Q1, mais est-ce que la somme ou le produit changent si on on utilise une autrereprésentation de F1 = P1Q1 = P′1Q′1 ? Je vous laisse le vérifier par vous même.— Comme dit plus haut, les définitions de somme et produit de fractions rationnelles sont exactement celles desnombres rationnels.7.1.3. DérivéesDéfinition 7.5 Dérivée. Soit F = PQ une fraction rationnelle. On appelle dérivée de F la fraction rationnelleégale à P′QPQ′Q2.Remarque 7.3. Bien entendu, vous avez vérifié que cette définition ne dépendait pas du choix de P et Q. . .Propriété 7.1. Toutes les propriétés « classiques » de dérivées restent vraies :λF1′ = λF′1F1 +F2′ = F′1 +F′2F1F2′ = F′1F2 +F1F′2F1F2′= F′1F2 F1F′2F22Démonstration. Ce n’est que du calcul. . .7.1.4. DegréDéfinition 7.6 Degré d’une fraction rationnelle. Soit une fraction rationnelles FX = PQ KX. On appelledegré de F l’entier relatif :degF = degPdegQRemarque 7.4.— Là encore je vous laisse le soin de vérifier que le degré d’une fraction rationnelle ne dépend pas du choix de Pet Q.— Le degré des fractions rationnelles prolonge le degré des polynômes. C’est-à-dire quedegP z PKX= degP1zPKX667. Fractions Rationnelles
Page 73 : AlgèbreCPI12019/2020Propriété 7.2. Soit F1X et F2X deux fractions rationnelles de KX. On a alors :1. degF1 ×F2 = degF1+degF22. degF1 +F2 maxdegF1;degF2Démonstration.1. Posons F1 = P1Q1 et F2 = P2Q2 , alors F1 × F2 = P1×P2Q1×Q2 , donc degF1 × F2 = degP1 × P2 degQ1 ×Q2 = degP1degQ1+degP2degQ2 = degF1+degF2.2. De même, degF1 +F2 = degF1Q2 +F2Q1degQ1Q2, ordegF1Q2+F2Q1 maxdegF1Q2;degF2Q1, donc on a degF1+F2 degF1Q2degQ1Q2 ou degF1+F2 degF2Q1 degQ1Q2, c’est-à-dire degF1 + F2 degF1 ou degF1 + F2 degF2, finalement,degF1 +F2 maxdegF1;degF2.Remarque 7.5. Encore une fois, à vous de vérifier que les calculs précédents ne dépendent pas de la représentationchoisie pour F1 et F2.7.1.5. Zéros et pôlesDéfinition 7.7 Zéro et pôle. Soit F = PQ KX irréductible et λ K.— λ est un zéro de F si et seulement si λ est une racine de P. La multiplicité de λ en tant que zéro de F estégale à la multiplicité de λ en tant que racine de P.— λ est un pôle de F si et seulement si λ est une racine de Q. La multiplicité de λ en tant que pôle de F estégale à la multiplicité de λ en tant que racine de Q.Remarque 7.6. Cette fois nous avons imposé à la fraction rationnelle d’être sous forme irréductible. Cela impliquequ’un réel ne peut pas être à la fois pôle et zéro : un réel est soit un pôle, soit un zéro, soit rien du tout.Exemple 7.1. Dans RX, la fraction FX = 1+X+X2X13X2X+32X+4X5X2X33X2+12X5X42 a pour zéros :— 1 de multiplicité 3.— 3 de multiplicité 2.— 4 de multiplicité 1.et pour pôles :— 0 de multiplicité 5.— 3 de multiplicité 3 pôle triple.— 5 de multiplicité 1 pôle simple.— 4 de multiplicité 2 pôle double.2 n’est ni un pôle ni un zéro.Théorème 7.1 et définition Partie entière. Soit F = PQ KX. Il existe un unique polynôme E KX et uneunique fraction rationnelle R KX tels queF = E +Ret degR 07. Fractions Rationnelles67

Page 74 : CPI12019/2020AlgèbreLe polynôme E est appelé partie entière de F.Démonstration.Existence : Effectuons la division euclidienne de P par Q : il existe A et B éléments de KX tels que P = AQ+B etdegB degQ. Nous avons alors F = AQ+BQ= A + BQ. Posons alors E = A et R = BQ. Nous avons degR =degBdegQ 0 et F = E +R.Unicité : Soit E1, E2, R1, R2 des polynômes et fractions rationnelles satisfaisant l’énoncé du théorème. Alors E1 +R1 = E2 +R2, d’où E1 E2 = R2 R1. Ainsi, degE1 E2 = degR2 R1 maxdegR1;degR2 0. Lepolynôme E1 E2 est donc nul et R1 = R2.Remarque 7.7.— La démonstration précédente vous permet de constater que pour calculer la partie entière d’une fraction ration-nelle il suffit de faire la division euclidienne du numérateur par le dénominateur.— Cela veut aussi dire que si le degré de la fraction rationnelle est négatif, alors la partie entière est nulle.7.2. Décomposition en éléments simples7.2.1. ThéorieThéorème 7.2 Décomposition sur C. Soit F CX de partie entière E et de pôles distincts λ1,...,λr de multi-plicités respectives m1,...mr. Il existe une unique famille aik 1ir1kmide nombres complexes telle que :F = E +ri=1mik=1aikX λikzPartie polaire associée au pôle λiCette décomposition de F est appelée décomposition en éléments simples sur C.Démonstration. Hors programme.□Théorème 7.3 Décomposition sur R. Soit F = PQ RX irréductible de partie entière E. Soit la décompositionde Q en facteurs irréductibles :Q = αri=1X λimisj=1X2 +bjX +cjnjIl existe des familles uniques aik 1ir1kmi, ujk 1js1knj, vjk 1js1knjtelles que :F = E +ri=1mik=1aikX λikzPartie polaire associée au pôle λi+sj=1njk=1ujkX +vjkX2 +bjX +cjkzÉlément simple de seconde espèceCette décomposition de F est appelée décomposition en éléments simples sur R.687. Fractions Rationnelles

Page 75 : AlgèbreCPI12019/2020Démonstration. Hors programme.□Remarque 7.8. Bon. . .Ok, ces deux théorèmes vous semblent un peu abscons. Passons donc tout de suite à la pratique pour voir ce qu’il sepasse!7.2.2. PratiqueNous allons calculer la décomposition en éléments simples deFX =X 1X +3X3X 34X2 +12X 5X 42Le degré du numérateur étant inférieur à celui du dénominateur, la partie entière de F est nulle. D’après le théo-rème 7.3, il existe des réels tels que F se décompose ainsi :FX = aX + bX2 + cX3 +dX 3 +eX 32 +fX 33 +gX 34 +hX 5 +jX 4 +kX 42+ lX +mX2 +1 + nX +oX2 +12Bien sûr on pourrait tout développer, identifier tous les coefficients et, après 42 pages de calculs et 37 relectures pourtraquer les erreurs de calculs, déterminer les 14 inconnues.Nous allons voir des méthodes systématiques et efficaces adaptées à chaque cas.7.2.2.1. Éléments simples de première espèce7.2.2.1.1. Pôle simpleSoit λ un pôle simple de F = PQ, alors Q = X λQ1 avec Q1λ ̸= 0 racine simple.7.2.2.1.1.1. Multiplication-évaluationNous avons F = PQ =aXλ + R. En multipliant l’égalité par X λ et ensimplifiant la fraction, nous obtenonsPQ1 = a+X λR. Nous avons donca = PλQ1λAppliquons cela à notre exemple pour calculer h 5 étant le seul pôle simple :h =515+35353452 +12542 =153 ×2×132 =1422507.2.2.1.1.2. DérivationRemarquons que Q′ = X λQ′1+Q1 donc Q′λ = Q1λ. Ainsi, en reprenant le résultatde la méthode précédente :a = PλQ1λ = PλQ′λCette méthode fonctionne exclusivement sur les pôles simples et est surtout pratique lorsque l’on connait la formedéveloppée du dénominateur et que l’on ne veut pas le factoriser par exemple si le dénominateur vaut Xn 1.7.2.2.1.2. Pôles doublesSoit λ un pôle double de F = PQ, alors Q = X λ2Q1 et Q1λ ̸= 0.7. Fractions Rationnelles69
Page 76 : CPI12019/2020Algèbre7.2.2.1.2.1. Premier coefficientNous pouvons utiliser le principe de «multiplication-évaluation» du paragraphe 7.2.2.1.1.1 :Nous avons F = PQ =aXλ2 +bXλ +R. En multipliant l’égalité pas X λ2, nous obtenonsPQ1= a+bX λ+X λ2R7.1Nous avons donca = PλQ1λAppliquons cela à notre exemple pour calculer k.k =3×743 ×172 ×1k = 21184967.2.2.1.2.2. Second coefficientMaintenant que l’on connaît le coefficient a, il existe deux méthodes pour calcu-ler b.7.2.2.1.2.2.1. SoustractionNous pouvons calculer F1 = F aXλ2. Après mise au même dénominateur, le nu-mérateur et le dénominateur se simplifient forcément sinon il y a une erreur de calcul et λ devient une racine simplede F1. Le coefficient b peut alors se calculer avec les méthodes vues au paragraphe 7.2.2.1.1.Appliquons cela au calcul de j.F +2118496X 42 = 18496X 1X +3+21X3X 34X2 +12X 518496X3X 34X2 +12X 5X 42=21X11 273X10 +1344X9 3276X8 +4746X7 5754X6 +5460X53108X4 +609X3 6069X2 5780X +1387218496X3X 34X2 +12X 5X 4Bien sûr, en exercice et en examen vous n’aurez pas de tels calculs à faire à la main. . .On trouve alorsj =21×411 273×410 +1344×49 3276×48 +4746×47 5754×46 +5460×453108×44 +609×43 6069×165780×4+1387243 ×1721j =601912577287.2.2.1.2.2.2. DérivationEn dérivant l’équation 7.1, nous obtenonsPQ1′= b + X λ2R + X λR′.Ainsi, en évaluant en λ nous avons :b = PQ1′λCette méthode demande d’être capable de calculer simplement la dérivée de la fraction rationnellePQ1 , c’est-à-direque P et Q1 devront de préférence être sous forme développé.7.2.2.1.3. Pôles d’ordre supérieur ou égal à 37.2.2.1.3.1. Premier coefficientLes méthodes de « multiplication-évaluation » vues aux paragraphes 7.2.2.1.1.1et 7.2.2.1.2.1 peuvent se généraliser à toutes les multiplicités. Ainsi nous pouvons calculer simplement les coefficients707. Fractions Rationnelles

Page 77 : AlgèbreCPI12019/2020c et g :c =334542c =127×5×16c =12160g =2×633 ×102 ×2g = 14507.2.2.1.3.2. Division selon les puissances croissantesPour calculer les autres coefficients, on peut toujoursappliquer la méthode de soustraction vue au paragraphe 7.2.2.1.2.2.1. Au fur et à mesure des soustractions, les frac-tions se simplifient, mais les calculs restent lourds. La méthode de la « division selon les puissances croissantes »permet de calculer tous les coefficients d’un pôle d’un coup.Pour calculer les coefficients du pôle λ de multiplicité n, on effectue le changement de variable Y = X λ, et onré-écrit F en fonction de Y. Le nouveau pôle est alors 0, de multiplicité n. Nous avons donc F ×Y n = P×YnQ= PQ1 =a0 + a1Y + ··· + an1Y n1 +Y nR. Les n coefficients se trouvent alors en faisant une division selon les puissancescroissantes de P par Q1, que l’on arrête dès que l’on obtient le ne coefficient correspondant au monôme de degrén1.Le principe est le même que la division euclidienne, mis à part qu’au lieu d’ordonner les polynômes selon les puis-sances décroissantes, on les ordonne selon les puissances croissantes. Bien évidement, pour se faire, les polynômesdoivent être sous forme développée.Calculons les coefficients d, e, f et g correspondant au pôle 3 de multiplicité 4. Effectuons le changement devariable Y = X 3, c’est-à-dire X = Y +3. AinsiFY =Y +2Y +6Y +33Y 4Y 2 +6Y +102Y 2Y 12FY =Y 2 +8Y +12Y 4 Y 10 +17Y 9 +112Y 8 +314Y 7 +29Y 6 1919Y 5 3538Y 4 +1168Y 3 +7596Y 2 +1620Y 5400Lors de la division, il faut garder en tête que l’on ne s’intéresse qu’aux degrés inférieurs ou égaux à 3 pôle demultiplicité 4.12+8Y+Y 25400+1620Y +7596Y 2 +1168Y 3 ...12185 Y42225 Y 2584225Y 3+...1450 2913500Y 8922500Y 2 142433037500Y 3585 Y+44725 Y 2+584225Y 3+...585 Y8725Y 26119375 Y 3+...+53425 Y 2+212771125 Y 3+...53425 Y 2801125Y 3+...+284861125+...284861125Nous avons donc g = 1450, f = 2913500, e = 8922500 et d = 142433037500. On remarque que l’on trouve le même g queprécédemment ouf!.7. Fractions Rationnelles71
Page 78 : CPI12019/2020AlgèbreOn peut refaire cette méthode pour calculer a, b et c pôle triple. Les calculs nous donnent c =12160, b =4164800 eta = 47417776000.À ce stade, nous pouvons écrire :F = 47417776000X +4164800X2 +12160X3 142433037500X 3 8922500X 32 2913500X 33 1450X 34+142250X 5 +60191257728X 4 2118496X 42 + lX +mX2 +1 + nX +oX2 +12Il nous reste les quatre coefficients correspondants au polynôme de degré 2 irréductible.7.2.2.2. Éléments simples de seconde espèceOn appelle ainsi les éléments simples faisant intervenir des polynômes du second degré irréductibles dans R.7.2.2.2.1. Passage dans C pour les pôles simplesPour calculer les coefficients correspondant, on peut faire ladécomposition dans C.Nous avons vu dans le chapitre 6 « Polynômes » que si un nombre complexe est racine d’un polynôme de RX alorsson conjugué aussi. Un élément simple de seconde espèce dans RX se met donc dans CX sous la formeaX λ +bX λavec a et b éléments de C. Or, puisque la fraction rationnelle F appartient à RX, on a FX = FX, d’où néces-sairementaXλ +bXλ =aXλ +bXλ. Par unicité de la décomposition, on ab = aFinalement, pour décomposer dans CX, il suffit de trouver l’un des coefficients, le second étant son conjugué.Pour revenir à RX on regroupe entre eux les éléments simples correspondant à des racines conjuguées.Exemple 7.2. Prenons un exemple particulier pour voir ce qu’il se passe. Soit F = X2+X1XX2+1 = aX +bX+cX2+X+1. Endécomposant F dans CX, on obtient F = 1X + 1i2Xi + 1+ i2X+i . En mettant les deux dernières fractions au mêmedénominateur, nous obtenons F = 1X + 1i2X+i+1+ i2XiX2+1= 1X + 2X+1X2+1.Remarque 7.9. Attention, cette méthode ne fonctionne que si le pôle est simple. En effet, si le pôle est multiple, lorsde la mise sous même dénominateur, le polynôme du numérateur deviendra alors de degré supérieur ou égal à 2, cequi n’est donc pas un élément simple. Il faudra alors le redécomposer en éléments simples.7.2.2.2.2. Multiplication-évaluation dans CUne autre méthode consiste à utiliser la méthode de multiplication-évaluation, mais dans C. Il faut garder en tête que les coefficients sont forcément réels.Reprenons notre exemple initial et calculons n et o : Multiplions F par X2 + 12 et évaluons le résultat en X = i.Nous avons alorsni+o =i1i+3i3i34i5i42ni+o =2919392500i48379392500En identifiant parties réelles et imaginaires, nous obtenons n =2919392500 et o = 48379392500.727. Fractions Rationnelles

Page 79 : AlgèbreCPI12019/20207.2.2.3. Autres méthodesIl nous reste encore deux coefficients à calculer. Voyons différentes méthodes moins efficaces que les précédentesmais qui peuvent parfois permettre de finir rapidement les calculs.7.2.2.3.1. Méthode de la limiteAprès avoir multiplié F par X, on calcule la limite lorsque X tend vers +desdeux écritures de XF. Nous obtenons ainsi des relations entre les coefficients. Cette méthode n’est donc efficace quelorsqu’il reste peu de coefficients à calculer. Notez surtout qu’elle est totalement inutile si vous n’avez pas suppriméla partie entière. En effet, dans ce cas, XFX tendra vers +.Sur notre exemple on a clairement limX→+XF = 0, ce qui nous donne0 = a+d +h+ j +lD’où l = ad hj =47417776000 +142433037500 142250 60191257728 =5080047103787125007.2.2.3.2. ÉvaluationOn peut évaluer F en certaines valeurs précises afin d’obtenir d’autres relations entre lescoefficients et calculer les derniers coefficients restants. D’une part,F1 =0×4132422332 = 0D’autre partF1 = a+b+cd2 + e4 f8 + g16 h4 j3 + k9 + l +m2+ n+o4Ainsi,m = 2a2b2c+d e2 + f4 g8 + h2 + 2j3 2k9 l n+o2m = 2×47417776000 2×4164800 22160 2×142433037500×2 +2×8922500×4 2×2913500×8 +2450×16+242250×4 +2×60191257728×3 +2×2118496×9 29148372×9392500 508004710378712500m = 381633751893562507.2.2.3.3. Parité/imparitéEn exploitant la parité ou l’imparité de F nous pouvons faire apparaitre des relationssimples entre les coefficients.Exemple 7.3. F =XX21 =aX1 +bX+1. Puisque F est impaire FX = FX nous avonsaX1 +bX+1 =aX1 +bX+1, c’est-à-direbX1 + aX+1 =aX1 + bX+1. Par unicité des coefficients oui, rappelez-vous des théo-rèmes 7.2 et 7.3, On en déduit que a = b.Il ne reste plus qu’à calculer l’un des deux coefficients par « multiplication-évaluation ». On obtientF =12X 1 +12X +1Au final, nous avons :F = 47417776000X +4164800X2 +12160X3 142433037500X 3 8922500X 32 2913500X 33 1450X 34+142250X 5 +60191257728X 4 2118496X 42 + 7725721X 109038210378712500X2 +1 +291X 48379392500X2 +127. Fractions Rationnelles73
Page 80 :

Page 81 : Deuxième partieS275
Page 82 :

Page 83 : 8. Groupes8.1. Lois de composition interne8.1.1. DéfinitionsDéfinition 8.1 Loi de composition interne. Soit E un ensemble.— On appelle loi de composition interne ou opération sur E une application de E ×E dans E.— On appelle magma tout couple E ; constitué d’un ensemble E et d’une loi de composition interne surE.Remarque 8.1. Vous connaissez déjà un grand nombre de lci :— Sur R ou C : +, , ×, ÷.— Sur les fonctions : +, , ◦, mais aussi × et ÷ lorsque c’est définit.— Sur Z : +, , ×, , .— Sur l’ensemble des parties d’un ensemble : , , .Lorsque l’on a à faire à une loi pas habituelle, on note ces lois truc, machin, .Définition 8.2 Stabilité. Soit E ; un magma. Une partie A de E est dite stable par « » lorsque x;y A2, xy A. L’application de A×A dans A ainsi définie est appelée l’opération induite sur A.Définition 8.3 Loi produit. Soit E1 ; et E2 ; deux magmas. On définit sur E1 ×E2 la loi produit par :x1 ;x2y1 ;y2 = x1y1 ;x2y2La loi ainsi définie est une loi de composition interne sur E1 ×E2.Exemple 8.1. Soit z = ρeiθ et z′ = ρ′eiθ′ deux nombres complexes, alors zz′ = ρρ′eiθ+θ′. Si on munit R+ de la loide multiplication usuelle et R de la loi d’addition, alors la loi produit sur R+ ×R est définie par ρ;θρ′ ;θ′ =ρρ′ ;θ+θ′.Définition 8.4 Associativité, commutativité. Soit E ; un magma. La loi est dite :— Associative si et seulement si x;y;z E3, x y z = x y z dans ce cas on dit que E ; est unmagma associatif.— Commutative si et seulement si x;y E2, x y = y x dans ce cas on dit que E ; est un magmacommutatif.77

Page 84 : CPI12019/2020AlgèbreExemple 8.2. Vous connaissez déjà plein de lois associatives ou commutatives.Remarque 8.2. Comme nous l’avons vu dans un chapitre antérieur, l’associativité permet de se passer des parenthèsesdans l’écriture des calculs : xyz = xyz.Définition 8.5 Distributivité. Soit E un ensemble et, et deux lois de composition interne sur E. On dit queest :— Distributive à droite par rapport à si et seulement six;y;z E3, xyz = xzyz— Distributive à gauche par rapport à si et seulement six;y;z E3, xyz = xyxz— Distributive par rapport à si et seulement si elle l’est à droite et à gauche.Exemple 8.3. Là encore vous connaissez pleins de lois distributives les unes par rapport aux autres.8.1.2. Éléments particuliersDéfinition 8.6 Élément neutre. Soit E ; un magma et e E. On dit que e est un élément neutre pour oude E ; si et seulement six E, xe = ex = xExemple 8.4. Vous en connaissez plusieurs.Théorème 8.1 Unicité de l’élément neutre. Soit E ; un magma. Alors E possède au plus un élément neutre.Démonstration. Si e et e′ sont deux éléments neutre de E pour , alors e = ee′ = e′.□Remarque 8.3. S’il existe un élément neutre de E ; alors il est unique et dans ce cas on parle de l’élément neutrede E ;. On le note généralement 1E ou 1 en notation multiplicative et 0E ou 0 en notation additive.Définition 8.7 Itérés. Soit E ; un magma dont la loi est associative et possédant un élément neutre e. Pourtout n N et pour tout x E, on appelle itéré ne de x, noté xn en notation multiplicative ou nx en notationadditive l’élémentn foiszx··· x défini par récurrence parx0 = e et xn+1 = xxn si n NEn notation multiplicative.0x = e et n+1x = xnx si n NEn notation additive.788. Groupes

Page 85 : AlgèbreCPI12019/2020Exemple 8.5. Dans l’ensemble des fonctions, muni de la loi de composition des fonctions, f 2x désigne f ◦fxet non fx2.Définition 8.8 Symétrique, Inverse. Soit E ; un magma possédant un élément neutre e et x E. On dit quex— Admet un symétrique à droite ou un inverse à droite si et seulement si il existe x′ E tel que xx′ = e.— Admet un symétrique à gauche ou un inverse à gauche si et seulement si il existe x′ E tel que x′ x = e.— Admet un symétrique ou inverse si et seulement si il existe x′ E qui est à la fois symétrique à droite et àgauche.— Est inversible ou symétrisable si et seulement si il possède un inverse, c’est-à-dire il existe x′ E tel quexx′ = x′ x = eExemple 8.6. Dans l’ensemble des fonctions, muni de la composition de fonctions, f est inversible c’est-à-direbijective si et seulement si il existe g tel que g◦f = f ◦g = Id.Propriété 8.1 Unicité de l’inverse dans un magma associatif. Soit E ; un magma associatif possédant unélément neutre e et x E.Si x possède un symétrique à droite x′ et un symétrique à gauche x′′, alors x′ = x′′.Si x possède un symétrique, alors il est unique.Démonstration. On a xx′ = e = x′′ x. Par associativité de la loi , nous avonsx′ = ex′ = x′′ xx′ = x′′ xx′ = x′′ e = x′′Le second point découle du premier : si x1 et x2 sont deux symétriques de x, alors x1 est un symétrique à droite et x2un symétrique à gauche.□Remarque 8.4. Puisque un inverse, lorsqu’il en existe un, est unique, on peut parler du symétrique ou de l’inverse dex. On le note x1 en notation multiplicative et x en notation additive dans ce cas, on parle aussi d’opposé.Propriété 8.2 Simplification par un élément inversible. Soit E ; un magma associatif possédant un élémentneutre et x;y;z E3. Si x est inversible alorsxy = xz ⇒y = zyx = zx ⇒y = zRemarque 8.5.— Attention! Si x n’est pas inversible, les implications sont fausses.— Il suffit que x soit inversible à gauche pour la première implication et à droite pour la seconde.8. Groupes79
Page 86 : CPI12019/2020AlgèbreDémonstration. Il suffit de multiplier à gauche ou à droite par l’inverse de x et utiliser l’associativité de la loi .□Définition 8.9 Élément régulier. Soit E ; un magma et a E. On dit que a est :— Régulier à droite si et seulement si x;y E2, xa = ya ⇒x = y.— Régulier à gauche si et seulement si x;y E2, ax = ay ⇒x = y.— Régulier s’il est régulier à droite et à gauche.Remarque 8.6. On en déduit qu’un élément inversible resp. à droite, resp. à gauche est régulier resp. à droite, resp.à gauche, mais la réciproque est fausse. En effet sur N;+, tout élément est régulier, cependant, seul 0 possède uninverse un opposé en l’occurrence car si n Nalors n /N.Propriété 8.3 Inversibilité d’un produit. Soit E ; un magma associatif possédant un élément neutre e etx;y E2.Si x et y sont inversibles, alors xy aussi et xy1 = y1 x1Démonstration. Là encore, il suffit de faire les multiplications en utilisant l’associativité de la loi .□Remarque 8.7. Attention à l’ordre des inverses qui est important si la loi n’est pas commutative.Propriété 8.4 Puissances négatives. Soit E ; un magma associatif possédant un élément neutre e et x E. Six est inversible alors pour tout n N, xn aussi etxn1 =x1nOn note alors cet élément xn, définissant ainsi xk pour tout k Z.Démonstration. Facile.□Propriété 8.5 Inversibilité de l’inverse. Soit E ; un magma associatif possédant un élément neutre e et x E.Si x est inversible alors son inverse x1 aussix11 = xDémonstration. Facile.□808. Groupes
Page 87 : AlgèbreCPI12019/2020Exemple 8.7. Soit E et F deux ensembles non vides et une lci sur F. On peut définir sur FE la loi de compo-sition interne par :f,g FE, f g :E→Fx7→fxgx— Si est commutative ou associative, alors aussi.— Si e est l’élément neutre de F ;, alors l’application constante ϕ :E→Fx7→eest l’élément neutredeFE ;.C’est en particulier ainsi que l’on définit la somme et le produit de fonctions réelles.8.2. Groupes8.2.1. GroupesDéfinition 8.10 Groupe. Soit G; un magma. On dit que G; est un groupe si et seulement si :1. La loi est associative.2. La loi admet un élément neutre.3. Tout élément est inversible dans G.Un groupe G; est dit commutatif ou abélien lorsque la loi est commutative.Remarque 8.8.— Un groupe possédant un élément neutre il est nécessairement non vide.— Un groupe est un magma et est donc noté G;, cependant, afin d’alléger les notations, on omet souvent la loi. On dit par exemple simplement « Soit G un groupe ».— Par convention, la loi d’un groupe est notée multiplicativement ou ·, dans ce cas il arrive souvent que l’onomette carrément la loi en notant simplement xx′ au lieu de xx′.— Par convention encore, si le groupe est commutatif, on note la loi additivement, c’est-à-dire G;+.Exemple 8.8.— Z;+, Q;+, R;+, C;+, Q;×, R;× et C;× sont des groupes abéliens notez bien quel’on a retiré le zéro pour les trois derniers.— N;+, Z;×, R;× ne sont pas des groupes un ou plusieurs éléments ne sont pas inversibles.Propriété 8.6. Dans un groupe tout élément est régulier. C’est-à-dire, si G; est un groupe alorsa;b;c G3, ac = bc ⇒a = betca = cb ⇒a = bDémonstration. Nous avons déjà remarqué que « inversible »⇒« régulier ». Or tout élément d’un groupe est inver-sible.□8. Groupes81
Page 88 : CPI12019/2020AlgèbrePropriété 8.7. Soit G1 ;, G2 ; deux groupes et e1, e2 leurs éléments neutres.— L’ensemble G1 ×G2 est un groupe pour la loi produit.— L’élément neutre de G1 ×G2 est e1 ;e2.— Pour x1 ;x2 G1 ×G2, x1 ;x21 =x11 ;x12.Démonstration. Les deux derniers points permettent de montrer le premier. Commençons par ceux-là. Notons laloi produit sur G1 ×G2.— Élément neutre : Soit x1 ;x2 G1 ×G2, alorsx1 ;x2e1 ;e2 = x1 e1 ;x2e2 = x1 ;x2 = e1 x1 ;e2 x2 = e1 ;e2x1 ;x2— Inverse : Soit x1 ;x2 G1 ×G2, alorsx1 ;x2x11 ;x12=x1 x11 ;x2x12= e1 ;e2— Les lois et étant associatives, la loi produit aussi.D’où la propriété.□Définition 8.11 Permutation, Groupe symétrique. Soit E un ensemble non vide.— On appelle permutation de E toute bijection de E dans E.— On appelle groupe symétrique de E l’ensemble des permutations de E, noté SE. Le magma SE ;◦ est ungroupe d’élément neutre IdE.Démonstration.1. La loi de composition ◦est associative.2. L’identité de E, IdE est bien une bijection de E dans E. De plus pour toute application f en particulier unebijection de E dans E, nous avons f ◦IdE = IdE ◦f = f. Donc IdE est bien l’élément neutre de ◦.3. Si f est une bijection de E sur E alors sa bijection réciproque f 1 est aussi une bijection de E sur E.8.2.2. Sous-groupesDéfinition 8.12 Sous-groupe. Soit G; un groupe et H une partie de G. On dit que H est un sous groupe deG si et seulement si H ; est un groupe.Remarque 8.9. Un sous groupe est donc tout simplement un groupe dans un autre. Cependant, est-ce qu’ils partagentle même élément neutre? Si x H, l’inverse de x dans H est-il le même que sont inverse dans G?Théorème 8.2 Élément neutre et inverse dans un sous-groupe. Soit G un groupe d’élément neutre 1G et H unsous-groupe de G.1. 1G H2. H est stable par passage à l’inverse : h H,h1 H.828. Groupes
Page 89 : AlgèbreCPI12019/2020Démonstration.1. Puisque H est un groupe il possède un élément neutre 1H H G, qui vérifie 1H1H = 1H.Or G possède aussi un élément neutre 1G qui vérifie 1H1G = 1H. Ainsi, 1H1H = 1H1G. Puisque G est un groupeon peut simplifier à gauche par 1H, pour obtenir 1H = 1G H.2. Soit h H, notons h′ son inverse dans H et h1 son inverse dans G. Nous avons alors h′ = 1Gh′ = h1hh′ =h1hh′ = h11G = h1. Donc h1 H.Théorème 8.3 Caractérisation des sous-groupes. Soit G un groupe d’élément neutre 1G et H une partie de G.Alors H est un sous-groupe de G si et seulement si :1. 1G H2. H est stable par produit et passage à l’inverse, c’est-à-dire x,y H, xy1 H.Démonstration.⇒Si H est un sous-groupe, alors il est stable par produit, nous avons vu que 1G H et que H eststable par passage à l’inverse. D’où le résultat.⇐— 1G H et est élément neutre.— Comme 1G H et d’après le deuxième point de l’hypothèse, si h H, alors h1 = 1Gh1 H, d’où Hstable par passage à l’inverse.— Ensuite si h et h′ sont deux éléments de H, alors h′h = h′h11 H, donc H est stable par produit leproduit est bien une loi de composition interne de H.— L’associativité de la loi sur G est transmise sur H.La loi de G est donc bien une lci sur H, associative, possédant un élément neutre 1G dans H et tout élémentde H est inversible dans H, conclusion, H est bien un groupe pour la loi de G, donc un sous-groupe de G.Remarque 8.10. Pour montrer qu’une partie est un sous-groupe à partir de la seule définition, nous avons de nom-breuses choses à montrer : associativité de la loi, la stabilité par la loi et la stabilité par l’inverse. Or si on utilise lethéorème précédent, on a juste à montrer que l’élément neutre est dans H souvent simple et la stabilité par le produitxy1. En pratique on utilise donc le théorème de caractérisation.De même, pour montrer qu’un magma est un groupe, on cherche plutôt à montrer que c’est un sous-groupe d’ungroupe connu.Exemple 8.9. Pour tout groupe G, G et 1G sont des sous-groupes de G.Un sous groupe H de G différent de G et 1G est appelé sous-groupe propre de G.Exemple 8.10. Z;+ est un sous groupe de Q;+ qui est un sous-groupe de R;+ qui est un sous-groupe deC;+. De même pour Q;×, R;×, C;×.Exemple 8.11.— U;× est un groupe.Démonstration. Il suffit de montrer que c’est un sous-groupe de C;×.— Nous avons bien U C.— L’élément neutre de C;× est 1 et 1 = 1, donc 1 U.— Pour tous u,u′ U,u1u′ =u′u = u′u = 11 = 1, donc u1u′ U.— Un ;× est ou groupe.Démonstration. C’est un sous-groupe de U;×.— Nous avons bien Un U.8. Groupes83

Page 90 : CPI12019/2020Algèbre— L’élément neutre de U;× est 1 et 1n = 1, donc 1 Un.— Pour tous u,u′ Un,u1u′n =u′un= u′nun = 11 = 1, donc u1u′ Un.8.3. Morphismes8.3.1. DéfinitionsDéfinition 8.13 Morphisme. Soit E ;, F ; deux magmas et f une application de E dans F. On dit que fest un morphisme de E ; dans F ; si et seulement six;y E2, fxy = fxfyRemarque 8.11. Un morphisme f est dit injectif, surjectif, bijectif lorsque l’application f est injective, surjective,bijective.Exemple 8.12. L’applicationϕ :R+ ×R→Cρ;θ7→ρeiθest un morphisme surjectif deR+ ;××R;+ muni de la loi produit dans C;×.En effet, la loi produit est définie par ρ;θ ρ′ ;θ′ = ρρ′ ;θ+θ′ etϕρ;θ ρ′ ;θ′= ϕρρ′ ;θ+θ′= ρρ′eiθ+θ′ =ρeiθ×ρ′eiθ′= ϕρ;θ×ϕρ′ ;θ′Définition 8.14 Homomorphisme, Endomorphisme, Isomorphisme, Automorphisme. Un morphisme estaussi appelé un homomorphisme.Soit E ; un magma. On appelle endomorphisme de E ; un morphisme de E ; dans lui même.On appelle isomorphisme un morphisme bijectif.On appelle automorphisme un endomorphisme bijectif.Définition 8.15 Morphisme de groupes. On appelle morphisme de groupes un morphisme de magmas entredeux groupes.8.3.2. PropriétésPropriété 8.8.— La composée de deux morphismes est un morphisme.— La réciproque d’un isomorphisme est un isomorphisme.Démonstration. Soit f un morphisme de E ; dans F ; et g un morphisme de F ; dans G;.848. Groupes

Page 91 : AlgèbreCPI12019/2020— Pour x et y dans E, on ag◦fxy = g fxfy = g◦fxg◦fyCela montre que g◦f est un morphisme.— Si f est un isomorphisme, pour tout x et y de F, on aff 1xf 1y= ff 1xff 1y= xy = ff 1xyDonc par injectivité de f, f 1xy = f 1xf 1y et f 1 est un morphisme.Propriété 8.9. Soit G1 ; et G2 ; deux groupes d’éléments neutres e1 et e2 et f un morphisme de G1 dans G2.Alors1. fe1 = e22. pour tout x G1, fx1= fx1 et pour tout n Z, fxn = fxn.Démonstration.1. Nous avons e1 = e1e1, donc fe1 = fe1e1 = fe1fe1 d’où fe1e2 = fe1fe1,puis en simplifiant par fe1 nous sommes dans un groupe, e2 = fe1.2. Nous avons xx1 = x1 x = e1, donc fxfx1 = fx1fx = fe1 = e2. Donc fx1 = fx1.Le dernier point est évident récurrence par exemple.Propriété 8.10 Image d’un sous-groupe. Soit G1 ; et G2 ; deux groupes et f un morphisme de G1 dansG2. Alors si H1 est un sous groupe de G1 ;, alors fH1 est un sous groupe de G2 ;Démonstration. Puisque H1 est non vide, fH1 non plus. Soit y1 et y2 dans fH1, il existe donc x1 et x2 dans H1tels que y1 = fx1 et y2 = fx2. Nous avons alors y1y12= fx1 fx21 = fx1fx12 = fx1 x12 . OrH1 est un sous-groupe donc x1 x12H1 d’où y1y12fH1. Donc fH1 est un sous-groupe.□Propriété 8.11 Image réciproque d’un sous-groupe. Soit G1 ; et G2 ; deux groupes et f un morphismede G1 dans G2. Alors si H2 est un sous groupe de G2 ;, alors f 1H2 est un sous groupe de G1 ;Démonstration. Puisque fe1 = e2 H2, nous avons e1 f 1H2 et donc f 1H2 est non vide. Soit x1 et x2 dansf 1H2, alors fx1 et fx2 sont dans H2, d’où fx1 fx21 H2, donc fx1 x12 H2 et x1 x12f 1H2.D’où la propriété.□8.3.3. Noyau et imageDéfinition 8.16 Noyau, Image. Soit G1 ; et G2 ; deux groupes et f un morphisme de G1 dans G2.— fG1 est appelé image du morphisme f et est noté Im f— f 1 e2 est appelé noyau de f et est noté Ker f.8. Groupes85

Page 92 : CPI12019/2020AlgèbreExemple 8.13.— Soit n N. L’application f :C→Cz7→znest un endomorphisme surjectif du groupeC;×. Son noyau est le groupe Un.— L’application f :R→Uθ7→eiθest un morphisme surjectif du groupe R;+ dans le groupe U;×.Son noyau est le groupe 2πZ.— L’application f :R+ ×R→Cρ;θ7→ρeiθest un morphisme surjectif du groupeR+×;×R;+ dans legroupe C;×. Son noyau est le groupe 1×2πZ.— L’application f :C→Cz7→ezest un morphisme surjectif du groupe C;+ dans le groupe C;×.Son noyau est le groupe 2iπZ.Théorème 8.4. Soit G un groupe d’élément neutre e et f un morphisme de G dans un autre groupe. Alors f est unmorphisme injectif si et seulement Ker f = eDémonstration. Notons G; le premier groupe et G2 ; le second groupe.— Supposons f injectif et soit x Ker f. Alors par définition, fx = e2 = fe et par injectivité de f, x = e. Ainsie Ker f e, d’où l’égalité.— Supposons que Ker f = e et soit x1 et x2 dans G tels que fx1 = fx2. Nous avons alors e2 = fx1 fx21 =fx1 x12 . Ainsi x1 x12Ker f = e. Donc x1x12= e et x1 = x2. Ainsi, f est injective.868. Groupes

Page 93 : 9. Systèmes linéairesVous avez rencontré pour la première fois les systèmes linéaires en 3e avec des systèmes « 2×2 ». Vous avez apprisà les résoudre avec la méthode dite de « substitution ». Cette méthode semble vous avoir suffitout au long du lycée,mais elle n’est plus viable lorsque les systèmes deviennent gros. Ce chapitre va introduire une méthode efficace etsystématique programmable sur machine de résolution de systèmes linéaires.Les matrices, bien que pas encore étudiées vont être utilisées comme « tableaux de nombres » nous permettant desimplifier les notations lors des résolutions de systèmes linéaires.L’ensemble K désigne soit R soit C, n et p sont des entiers naturels non nuls.9.1. DéfinitionsDéfinition 9.1 Équation linéaire. Soit p N. On appelle équation linéaire à p inconnues x1, . . ., xp, uneéquation de la forme a1x1 +···+apxp = b avec a1,...,ap,b Kp+1.Une solution d’une telle équation est notée sous forme d’un vecteur : s1,...,sp Kp.On appelle équation homogène associée à l’équation linéaire, l’équation obtenue en remplaçant b par 0.Remarque 9.1.— L’équation cartésienne d’une droite du plan est une équation linéaire à deux inconnues.— L’équation cartésienne d’un plan de l’espace est une équation linéaire à trois inconnues.— Le vecteur nul 0,...,0 est toujours solution d’une équation homogène.— Si s1,...,sp est solution d’une équation homogène alors pour tout λ K, λs1,...,λsp est aussi solution.— Si s1,...,sp et s′1,...,s′p sont solutions d’une équation homogène alors s1 +s′1,...,sp +s′p est aussi solu-tion. Donc l’ensemble des solutions homogènes est un espace vectoriel.Définition 9.2 Système linéaire. Soit n et p appartenant à N. On appelle système linéaire de n équations à pinconnues x1, . . ., xp un système de la forme :a1,1x1 +···+a1,pxp=b1......an,1x1 +···+an,pxp=bnoù les ai,j et bi 1 i n, 1 j p sont des éléments de K.Un vecteur s1,...,sp Kp est solution du système si et seulement si il est solution de toutes les équationslinéaires composant le système.On appelle système d’équations homogènes le système obtenu en remplaçant tous les bi par 0.Remarque 9.2.87

Page 94 : CPI12019/2020Algèbre— Le système d’équations cartésiennes d’une droite de l’espace est un système linéaire.— Si s1,...,sp est solution d’un système d’équations homogènes alors pour tout λ K, λs1,...,λsp est aussisolution.— Si s1,...,sp et s′1,...,s′p sont solutions d’un système d’équations homogènes alors s1 +s′1,...,sp +s′p estaussi solution espace vectoriel.Définition 9.3 Matrice associée à un système linéaire. Soit S le système linéairea1,1x1 +···+a1,pxp=b1......an,1x1 +···+an,pxp=bnOn appelle matrice associée au système S le « tableau de nombre » notéa1,1...a1,p.........an,1...an,pDéfinition 9.4 Matrice augmentée. Soit S le système linéaire :S =a1,1x1 +···+a1,pxp=b1......an,1x1 +···+an,pxp=bnla matrice A, la matrice associée :A =a1,1...a1,p.........an,1...an,pet B le vecteur colonne :B =b1...bnOn appelle matrice augmentée du système S la matrice obtenue en juxtaposant A et B :AB =a1,1...a1,pb1............an,1...an,pbn889. Systèmes linéaires
Page 95 : AlgèbreCPI12019/2020Exemple 9.1. Soit le système à cinq équations et 3 inconnues :S =3x1+2x2+5x3=72x1+2x3=4x1+x23x3=24x12x2=323x2+5x3=4Alors la matrice associée est325202113420035Et la matrice augmentée est3257202411324203203549.2. Systèmes équivalentsDéfinition 9.5 Opérations élémentaires. On appelle opération élémentaire sur les lignes d’un système oud’une matrice l’une des opérations suivantes :1. Échange des lignes Li et L j.2. Multiplication de la ligne Li par un scalaire λ Kλ ̸= 0.3. Ajouter λ·L j à la ligne Li.Les opérations élémentaires sur les lignes sont notées ainsi :1. Li ↔L j2. Li ←λLi λ ̸= 03. Li ←Li +λL j9. Systèmes linéaires89
Page 96 : CPI12019/2020AlgèbreDéfinition 9.6 Systèmes équivalents. Deux systèmes linéaires sont dits équivalents si et seulement si on passede l’un à l’autre par une suite finie d’opérations élémentaires sur les lignes.Définition 9.7 Matrices équivalentes en lignes. Deux matrices sont dites équivalentes en lignes si et seule-ment si on passe de l’une à l’autre par une suite finie d’opérations élémentaires sur les lignes. Deux matrices Met M′ équivalentes en lignes sont notées :M L M′Remarque 9.3.— Si on passe du système S1 au système S2 par une suite d’opérations élémentaires sur les lignesO1, . . .,Om, alors la suite d’opérations O1m , . . ., O11permet de passer de S2 à S1. Tout d’abord il faut seconvaincre que les O1isont bien des opérations élémentaires :1. Si O = Li ↔L j alors O1 = L j ↔Li est aussi une opération élémentaire sur les lignes.2. Si O = Li ←λLi λ ̸= 0 alors O1 = Li ←1λLi est une opération élémentaire sur les lignes.3. Si O = Li ←Li +λL j alors O1 = Li ←Li λL j est une opération élémentaire sur les lignes.Ainsi si S1 est équivalent à S2 alors S2 est équivalent à S1, ce qui justifie le fait de parler de deux systèmeséquivalents.Même remarque avec les matrices équivalentes en lignes.— C’est une relation d’équivalence.Propriété 9.1. Deux systèmes équivalents ont le même ensemble de solutions.Démonstration. Soit s1,...,sp une solution d’un système linéaire S1. Soit S2 un système équivalent à S1 et O l’unedes opérations élémentaires sur les lignes permettant de passer de S1 à S2.1. Si O = Li ↔L j alors il est évident que les solutions ne changent pas.2. Si O = Li ←λLi λ ̸= 0 alors nous avons simplement multiplié la ie équation par λ non nul, donc les solutionsne changent pas.3. Si O = Li ←Li +λL j alors, puisque s1,...,sp est à la fois solution de L j et de Li, il est aussi solution de λL jet de Li +λL j.Donc les solutions de S1 sont bien solutions de S2. Puisque l’on passe de S2 à S1 par des opérations élémentaires surles lignes, les solutions de S2 sont aussi des solutions de S1. Finalement, S1 et S2 ont les mêmes solutions.□Propriété 9.2. Si on passe d’un système S1 à un système S2 par une suite finie d’opérations élémentaires sur leslignes, alors la matrice augmentée de S2 s’obtient en effectuant la même suite d’opérations élémentaires sur leslignes sur la matrice augmentée de S1.Démonstration. C’est assez évident. Soit M1 et M2 les matrices augmentées de S1 et S2.1. Si on échange les lignes Li et L j du système S1 alors M2 s’obtient en échangeant les lignes Li et L j de M1.909. Systèmes linéaires

Page 97 : AlgèbreCPI12019/20202. Si on multiplie la ligne Li du système S1 par λ ̸= 0 alors M2 s’obtient en multipliant la ligne Li de M1 par λ ̸= 0.3. Si on remplace la ligne Li du système S1 par la ligne Li + λL j alors M2 s’obtient en remplaçant la ligne Li deM1 par la ligne Li +λL j.Remarque 9.4. Cette propriété justifie le fait d’utiliser la notation matricielle pour résoudre les systèmes.Exemple 9.2. Reprenons l’exemple 9.1 précédent et effectuons la suite d’opérations élémentaires sur les lignessuivante :L1 ↔L3L2 ←L2 +2L1L3 ←L3 +3L1L4 ←L4 +4L1Le système obtenu après la première opération échange des lignes 1 et 3 est :S1 =x1+x23x3=22x1+2x3=43x1+2x2+5x3=74x12x2=323x2+5x3=4Puis les suivantes donnent :S2 =x1+x23x3=22x24x3=05x24x3=132x212x3=1923x2+5x3=4Les systèmes S1 et S2 sont équivalents et ont donc exactement les mêmes solutions.9.3. Algorithme de GaussVous remarquez sur l’exemple 9.2 précédent que les opérations élémentaires n’ont pas été choisies totalement parhasard. En effet, le but était de supprimer la variable x1 de toutes les lignes sauf de la première. En réitérant le procédéon peut ainsi réduire le nombre de variables et d’équations, et résoudre ainsi facilement le système. Voyons cela plusen détail.Afin de simplifier les notations, nous allons dorénavant travailler avec les matrices augmentées.Définition 9.8 Matrice échelonnée. Une matrice est dite échelonnée en lignes si elle vérifie les deux propriétéssuivantes :1. Si une ligne est entièrement nulle, toutes les lignes suivantes le sont aussi.2. À partir de la deuxième ligne, dans chaque ligne non entièrement nulle, le premier coefficient non nul àpartir de la gauche est situé à droite strictement du premier coefficient non nul de la ligne précédente.Cette définition ne semble a priori pas très claire, pourtant elle décrit une chose très simple.9. Systèmes linéaires91
Page 98 : CPI12019/2020AlgèbreExemple 9.3. La matrice123000231n’est pas échelonnée en lignes puisque la première condition n’est pas vérifiée : la deuxième ligne est entièrementnulle alors que la troisième ne l’est pas.La matrice12345004560134500012n’est pas échelonnée en lignes puisque la seconde condition n’est pas vérifiée : le premier coefficient non nul dela deuxième ligne est dans la troisième colonne alors que le premier coefficient non nul de la troisième ligne estdans la deuxième colonne.La matrice123456789234125602012345256012305425003345245002345205004240489001425425000004205000000042000000071000000010n’est pas une matrice échelonnée en lignes puisque la seconde condition n’est toujours pas vérifiée : le premiercoefficient non nul de la deuxième ligne n’est pas à droite mais en dessous de celui de la première ligne.929. Systèmes linéaires
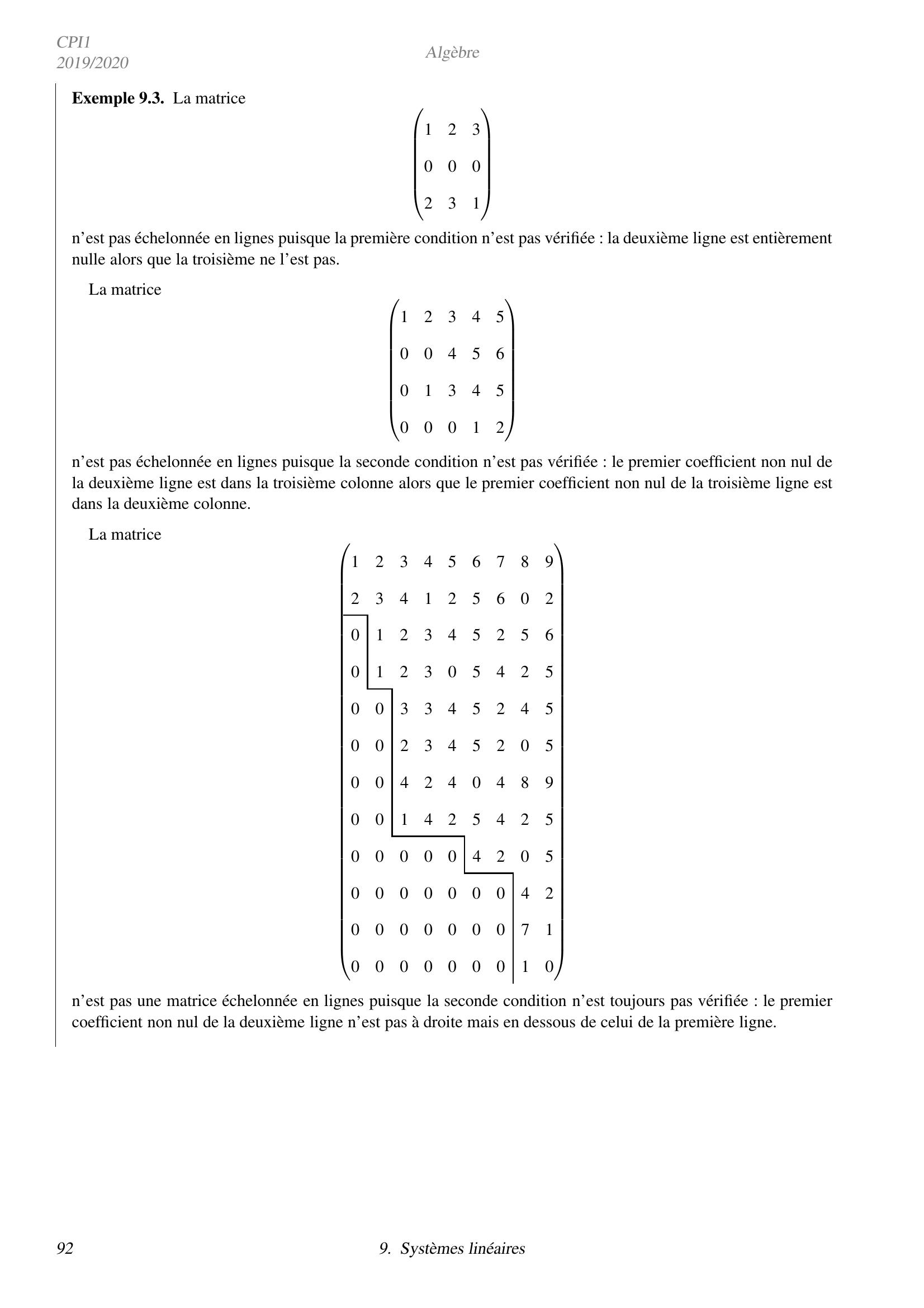
Page 99 : AlgèbreCPI12019/2020La matrice123456789034125602003345245000004205000000042000000000000000000est une matrice échelonnée en lignes. Chaque « marche » de l’échelonnement fait obligatoirement une hauteur de1. Toutes les lignes nulles se retrouvent en dernier.Définition 9.9 Pivot. Dans une matrice échelonnée en lignes, on appelle pivot le premier coefficient non nul dechaque ligne non entièrement nulle.Exemple 9.4. Pour la matrice échelonnée en lignes de l’exemple 9.3, les pivots sont dans l’ordre : 1, 3, 3, 4, 4.Propriété 9.3. Toute matrice non nulle est équivalente en ligne à une matrice échelonnée en lignes.Démonstration. Admis.□L’algorithme de Gauss est un algorithme efficace, facilement programmable sur machine et permettant de calculerles solutions de n’importe quel système linéaire. Il consiste principalement à transformer un système en un systèmeéquivalent et échelonné en lignes. Un tel système est alors facile à résoudre en « remontant les équations ». Voyonsson principe sur un exemple.Exemple 9.5. Soit le système à quatre inconnues et trois équations,S =2x1+7x2+11x3+15x4=193x1+5x2+8x3+11x4=14x1+x2+2x3+3x4=4La matrice augmentée estM =271115193581114112341. Première règle, il vaut toujours mieux avoir un pivot qui vaut 1. Nous allons donc échanger la première et9. Systèmes linéaires93
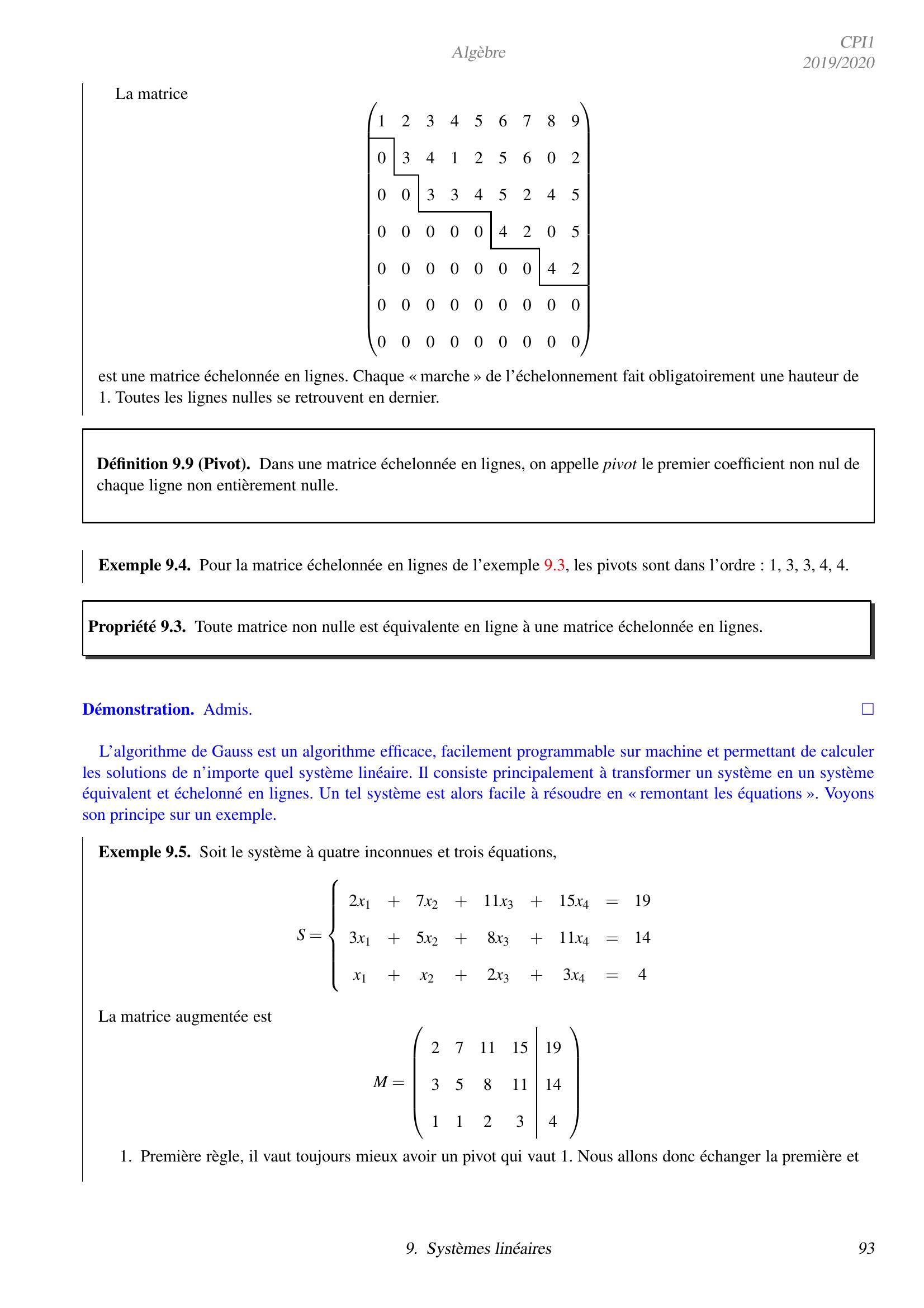
Page 100 : CPI12019/2020Algèbrela dernière ligne : L1 ↔L3.M1 =112343581114271115192. Le pivot de la première ligne vaut 1, nous pouvons donc remplir la première colonne avec des 0 en faisant :L2 ←L2 3L1 et L3 ←L3 2L1.M2 =11234022220579113. Nous pouvons facilement diviser la deuxième ligne par 2 : L2 ←12L2.M3 =11234011110579114. Maintenant que le pivot de la deuxième ligne vaut 1, nous pouvons recommencer le processus pour mettredes 0 dans la deuxième colonne : L3 ←L3 5L2.M4 =1123401111002465. Nous pouvons encore diviser la troisième ligne par deux L3 ←12L3 et obtenir la matrice échelonnée enlignes :M5 =112340111100123Le système S est donc équivalent au systèmeS5 =x1+x2+2x3+3x4=4x2+x3+x4=1x3+2x4=3949. Systèmes linéaires
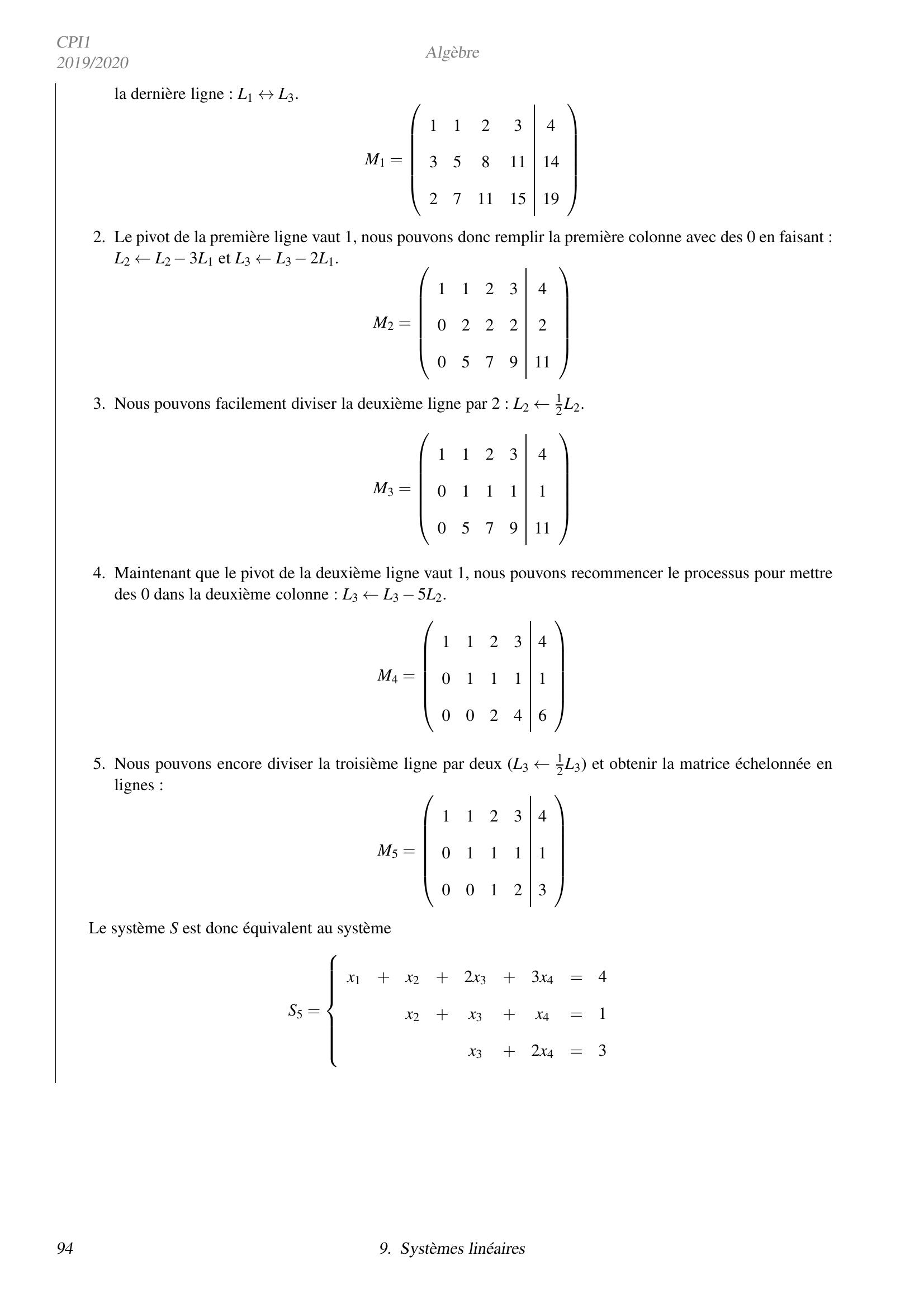
Page 101 : AlgèbreCPI12019/2020De la dernière ligne nous tirons que x3 = 32x4, que nous pouvons réinjecter dans les deux première lignes :S5 =x1+x2+232x4+3x4=4x2+32x4+x4=1x3=32x4SoitS5 =x1+x2x4=2x2x4=2x3=32x4De la seconde ligne nous tirons maintenant que x2 = x4 2, que nous réinjectons dans la première ligne :S5 =x1+x4 2x4=2x2=x4 2x3=32x4SoitS5 =x1=0x2=x4 2x3=32x4Les solutions sont donc :S =0;x4 2;32x4;x4 x4 KPuisque nous avons travaillé exclusivement avec des opérations élémentaires sur les lignes, nous sommes sûrsque nous avons trouvé toutes les solutions du système d’origine.Remarque 9.5. Soit S un système linéaire et M sa matrice augmentée associée.— Les lignes nulles de la réduction en lignes de M correspondent à des équations du type « 0 = 0 ». Elles peuventdonc être supprimées du système sans changer les solutions.— Si le pivot de la dernière ligne de la réduction en lignes de M après avoir enlevé les lignes nulles est dans ladernière colonne, alors cela correspond à une équation du type « 0 = b ̸= 0 ». Cette équation n’ayant pas desolution, le système d’origine n’a pas de solution.9.4. Résolution d’un système linéaireNous avons vu sur l’exemple 9.5 la méthode permettant de résoudre un système linéaire. Vous savez déjà qu’unsystème linéaire peut avoir 0, 1 ou une infinité de solutions comme dans l’exemple 9.5. Peut-on prédire à l’avancele nombre de solutions? Peut-il y a avoir, disons 7 solutions? Dans le cas où il y a une infinité de solutions, certainesdes variables jouent un rôle particulier comme x4 sur l’exemple 9.5. Combien de variables jouent un tel rôle? Nousallons répondre à cela dans cette section.Propriété 9.4. Soit M une matrice et M1 et M2 deux matrices échelonnées en lignes équivalentes en lignes à M.Alors le nombre de pivots de M1 est égal au nombre de pivots de M2.9. Systèmes linéaires95

Page 102 : CPI12019/2020AlgèbreDémonstration. Admis.□Remarque 9.6. La propriété 9.4 signifie que quelle que soit la manière dont on réduit M pour la rendre échelonnéeen lignes, le nombre de pivots est toujours le même.Définition 9.10 Rang d’une matrice / d’un système linéaire. On appelle rang d’une matrice M, noté rgMle nombre de pivots obtenus après réduction de M en matrice échelonnée en lignes.On appelle rang d’un système linéaire S, noté rgS le rang de sa matrice associée.Remarque 9.7. Il est assez évident que le rang d’une matrice est inférieur à la fois au nombre de lignes et au nombrede colonnes de la matrice.Définition 9.11 Inconnues principales/secondaires. Soit S un système linéaire à p inconnues de rang r dontla matrice associée est échelonnée en lignes.On appelle inconnues principales les r inconnues correspondant aux colonnes contenant les pivots.On appelle inconnues secondaires les pr inconnues restantes.Définition 9.12 Système compatible/incompatible. Un système linéaire est dit incompatible s’il n’admet au-cune solution. Il est dit compatible s’il admet au moins une solution.Exemple 9.6. Soit Sα,β le systèmex13x2+5x3=42x1+x24x3=13x12x2+x3=α4x15x2+6x3=βLa matrice augmentée associée est13542141321α456β969. Systèmes linéaires
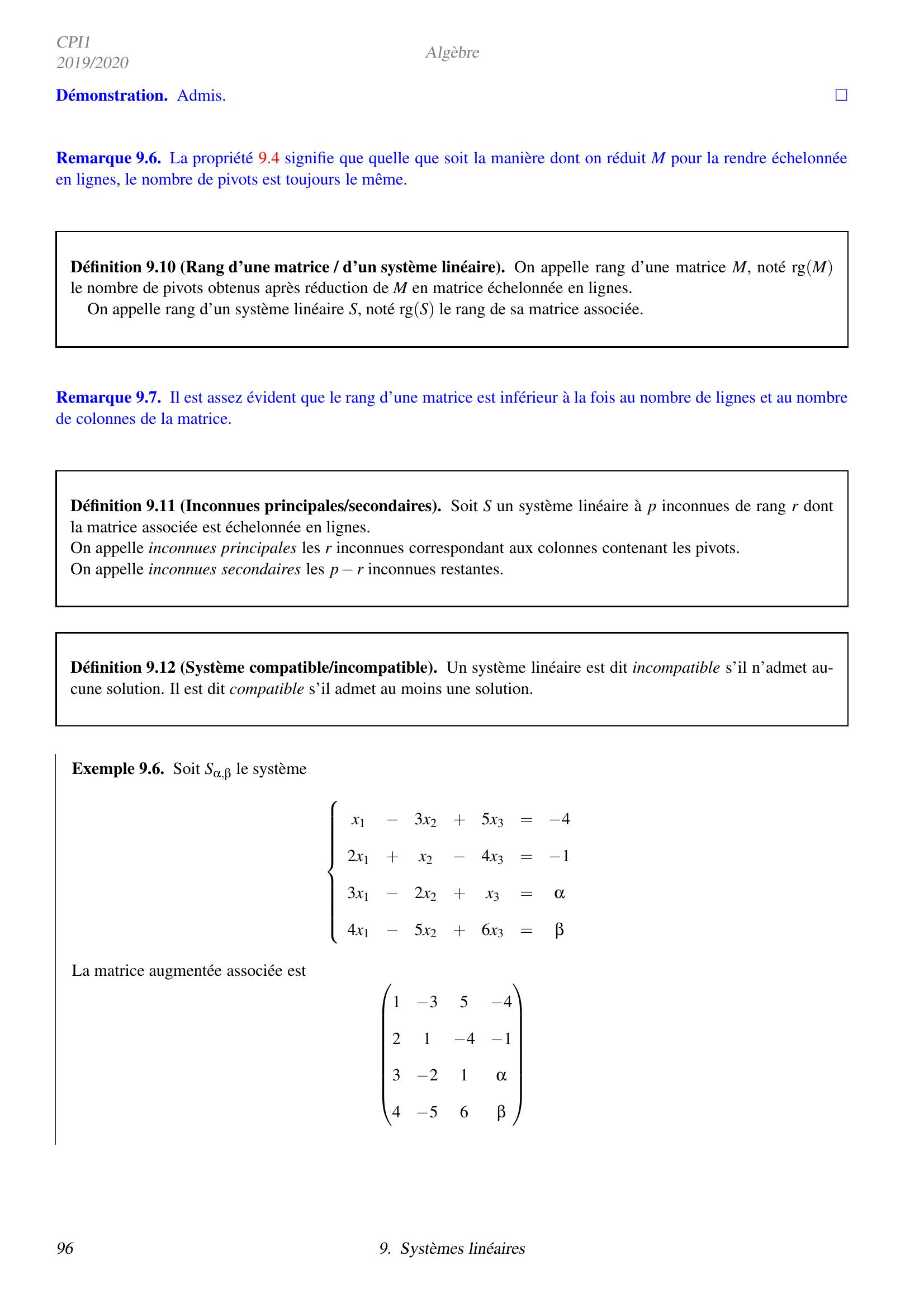
Page 103 : AlgèbreCPI12019/2020Sa réduction en lignes nous donne13540121000α+5000β+9On en déduit que le système admet des solutions si et seulement si α = 5 et β = 9. Dans ce cas, il est de rang2, les inconnues principales sont x1 et x2, l’inconnue secondaire est x3.Les solutions sont S =x3 1;2x3 +1;x3 x3 ROn voit sur l’exemple 9.6 que nous pouvons décrire toutes les solutions à l’aide des inconnues secondaires.Propriété 9.5. Soit S un système linéaire homogène à p inconnues, de rang r. Alors l’ensemble des solutions estun espace vectoriel de dimension pr.Démonstration. Admis.□Corollaire 9.1. Soit un système à n Néquations et p Ninconnues de matrice augmentée A,B tel que rgS = r.1. Si r = 0, alors A est la matrice nulle. Si B n’est pas le vecteur nul, il n’y a pas de solutions, sinon tout vecteurde Rp est solution.2. Si r = n = p, alors A se réduit en une matrice triangulaire supérieure. Quelque soit B, il y a une unique solution.3. Si r = n p, alors A se réduit en une matrice rectangulaire telle que les r premières colonnes forment unematrice triangulaire supérieure. Il y a alors une infinité de solutions dépendants de pr paramètres les prdernières inconnues.4. Si r = n p, alors A se réduit en une matrice rectangulaire telle que les r premières colonnes forment unematrice triangulaire supérieure. Il y a alors une infinité de solutions dépendants de pr paramètres les prdernières inconnues.5. Si r = p n, alors A se réduit en une matrice rectangulaire telle que les r premières lignes forment une matricetriangulaire supérieure et les lignes suivantes sont nulles.6. Si r minp,n, alors A se réduit en une matrice telle que les r premières lignes et colonnes forment unematrice triangulaire supérieure et les lignes suivantes sont nulles.Dans les deux derniers cas, si l’un des nr seconds membres br+1,...,bn est non nul, il n’y a pas de solution.Sinon, on supprime les nr dernières lignes et on retombe dans le cas 2 ou 3 solution unique dans le cas 4 etune infinité dans le cas 5.Démonstration. Intuitif.□Remarque 9.8. Notez qu’un système homogène possède obligatoirement au moins une solution : le vecteur nul.Exemple 9.7. Soit un système linéaire homogène à cinq inconnues et de rang trois. Supposons qu’après résolu-9. Systèmes linéaires97

Page 104 : CPI12019/2020Algèbretion, nous obtenions le système après suppression des lignes « 0=0 » :x2=2x1 +x3x4=x1 +2x3x5=2x1 x3Nous avons bien 3 inconnues principales : x2, x4 et x5 et 2 inconnues secondaires : x1 et x3. De plus un vecteursolution s’écrit :→v = x1;2x1 +x3;x3;x1 +2x3;2x1 x3avec x1 ;x3 R2Ainsi →v peut s’écrire→v = x1 1;2;0;1;2 +x3 0;1;1;2;1avec x1 ;x3 R2et les deux vecteurs 1;2;0;1;2 et 0;1;1;2;1 suffisent à décrire toutes les solutions du système.Propriété 9.6. Les solutions d’un système linéaire compatible s’obtiennent en additionnant une solution particu-lière à toutes les solutions du système homogène associé.Démonstration. Admis.□Exemple 9.8. Si on reprend le système de l’exemple 9.6 alors une solution particulière est 1;1;0 et lessolutions du système homogène s’écrivent λ1;2;1 avec λ R. Les solutions du système sont bien 1;1;0+λ1;2;1 = λ1;1+2λ;λ avec λ R.Exemple 9.9. Résoudre le système suivant on donnera le rang du système ainsi que toutes les solutions.S =2x1+3x2+4x3=1x1+2x2+3x3=24x1+2x2+x3=3Appliquons le pivot de Gauss à la matrice augmentée.234112324213L1 ↔L2, L2 ←L2 2L1, L3 ←L3 4L11232012306115989. Systèmes linéaires

Page 105 : AlgèbreCPI12019/2020L2 ←L2, L3 ←L3 +6L21232012300113Le rang du système est donc 3. Ainsi il y a 3 inconnues principales et 0 inconnues secondaires. Le systèmelinéaire homogène associé n’est donc décrit par aucun vecteur, sa seule solution est donc le vecteur nul. Lesystème S possède donc au plus une solution. Or après réduction par le pivot de Gauss, nous n’avons obtenuaucune équation incompatible de type 0 = b avec b ̸= 0. Ainsi le système S possède une unique solution c’esten fait une propriété générale que l’on verra plus tard corollaire 12.1.La solution est donnée en remontant de la dernière ligne du système à la première : x3 = 13, x2 = 32x3 =326 = 23 et x1 = 22x2 3x3 = 2+4639 = 9. La solution du système est donc S = 9;23;13.9. Systèmes linéaires99

Page 106 :

Page 107 : 10. Espaces vectorielsDans tout ce chapitre, K désigne soit R soit C en fait, dans la plupart des cas, K peut-être simplement un corpsquelconque.10.1. Espaces vectoriels10.1.1. Espaces vectorielsDéfinition 10.1 Scalaire. Les éléments de K sont appelés scalaires.Définition 10.2 Espace vectoriel. On appelle K-espace vectoriel on note souvent Kev un ensemble E munid’une addition notée et appelée loi de composition interne de E × E dans E, et d’une multiplication par unscalaire notée · et appelée loi de composition externe de K×E dans E, telles que :1. E ; est un groupe commutatif l’élément neutre est noté →0E. Pour rappel :— E est stable par addition : pour tout u;v E2, uv E— l’addition est associative : pour tout u;v;w E3, uvw = uvw— l’addition est commutative : pour tout u;v E2, uv = vu— l’addition admet un élément neutre : il existe un élément →0 E E tel que pour tout u E, u→0 E = u.— tout élément de E admet un opposé : pour tout u E, il existe u′ E tel que uu′ = →0 E. On noteu l’opposé de u.2. E est stable par multiplication par un scalaire : pour tout u E, pour tout λ K, λ·u E.3. la multiplication par un scalaire est associative : pour tout λ;µ K2, pour tout u E, λ·µ·u = λµ·u.4. la multiplication par un scalaire est distributive sur l’addition à droite et à gauche : pour tout λ;µ K2,pour tout u;v E2, λ·uv = λ·uλ·v et λ+µ·u = λ·uµ·u.5. pour tout u E, 1·u = uLorsqu’il n’y a pas d’ambiguïté sur les lois utilisées, on peut noter simplement E l’espace vectoriel, sinon on lenote E ,,·.Remarque 10.1. La loi est généralement notée simplement « + ».Voici quelques contre-exemples d’espaces vectoriels :1.— E = 0;3 n’est pas un espace vectoriel car 1 E et 3 E et pourtant 1+3 = 4 /E : l’ensemble n’est passtable pour l’addition.— E = 1;3 n’est pas un espace vectoriel car le seul élément neutre pour l’addition est 0 et 0 /E.— E = 1;2 n’est pas un espace vectoriel car 2 n’a pas d’opposé.2. E =x;y R2 / y 1n’est pas une espace vectoriel car →u =1; 12E mais 4·→u = 4;2 /E.101
Page 108 : CPI12019/2020AlgèbreExemple 10.1.— 0 est un Rev.— R est un Rev.— C est un Cev et un Rev.— R2, R3 et plus généralement Kn sont des Rev et des Kev.— L’ensemble des fonctions réelles continues muni de l’addition de fonctions et du produit par un réel est unRev.Définition 10.3 Vecteur. Soit E un K-espace vectoriel, les éléments de E sont appelés vecteurs.Remarque 10.2. Puisque les éléments d’un espace vectoriel sont des vecteurs, ils pourront être notés avec des flèches.Cependant, parfois, pour alléger l’écriture nous pourrons omettre la flèche.Propriété 10.1. Soit E un Kev, alors pour tout u E :— 0·u = →0 E— 1·u = uDémonstration.— 0·u = 0·u+→0 E = 0·u+u+u = 0·u+u+u = 0·u+1·u+u = 1·u+u = u+u = →0 E— u+1·u = 1·u+1·u = 1+1·u = 0·u = →0 E. Donc 1·u est bien l’opposé de u.Définition 10.4 Famille de vecteurs. Soit E un K-ev. On appelle famille de vecteurs de E tout n-upletu1 ;...;un En.Remarque 10.3.— L’ordre des vecteurs dans la famille est important.— Une famille peut comporter plusieurs fois le même vecteur.Définition 10.5 Combinaison linéaire d’une famille de vecteurs. Soit E un K-espace vectoriel. On dit queu E est combinaison linéaire de la famille u1 ;...;un s’il existe des scalaires λ1,...,λn de K tels que :u =ni=1λiui = λ1u1 +···+λnunCette écriture est également appelée décomposition du vecteur u suivant la famille de vecteurs u1 ;···;un10210. Espaces vectoriels

Page 109 : AlgèbreCPI12019/2020Exemple 10.2. Dans l’espace vectoriel des fonctions réelles, la fonction f : x 7→sinx + 1 est combinaisonlinéaire de la famille sin;cos.Remarque 10.4. La décomposition sur une famille n’est en générale pas unique. Prenons par exemple →e 1 = 1;2;0,→e 2 = 1;0;1 et →e 3 = 1;2;2. Alors le vecteur →u = 1;4;1 se décompose en →u = →e 1 + →e 2 + →e 3 =2→e 1 →e 2 +0→e 3.Propriété 10.2. Soit E un K-ev et v1,...,vp, p vecteurs de E tous combinaisons linéaires d’une famille u1 ;...;un.Alors toute combinaison linéaire u des vecteurs v1,...,vp est une combinaison linéaire des vecteurs u1,...,un.Démonstration. Nous avons par hypothèse, pour tout i J1; pK, vi =nk=1λi,kuk et u =pj=1αjvj. On en déduit :u =pj=1αj nk=1λ j,kuk!=pj=1nk=1αjλ j,kuku =nk=1pj=1αjλ j,kuk =nk=1 pj=1αjλ j,k!uku =nk=1βkuken posant βk =pj=1αjλ j,k10.1.2. Produit d’une famille finie d’espaces vectorielsThéorème 10.1. Soit n 2 un entier naturel, E1,...,En des K-espaces vectoriels et E = E1 × ··· × En. On définitsur E :1. L’addition par u1 ;...;unE v1 ;... ;vn = u1 E1 v1 ;...;un En vn2. Le produit externe par λ·E u1 ;... ;un = λ·E1 u1 ;... ;λ·En unOù u1 ;...;un et v1 ;...;vn sont des éléments quelconques de E et λ un élément de K.Alors E ;E ;·E est un K-espace vectoriel.Démonstration. Il suffit d’écrire les choses. Nous avons déjà vu que le produit de groupes était un groupe pour la loiproduit. Il ne reste plus qu’à vérifier les propriétés pour le produit externe.□Corollaire 10.1. Pour tout K-espace vectoriel E et tout entier n N, En est un K-espace vectoriel.Démonstration. C’est le théorème précédent avec E1 = E2 = ··· = En.□10. Espaces vectoriels103
Page 110 : CPI12019/2020Algèbre10.1.3. Sous-espaces vectorielsDéfinition 10.6 Sous-espace vectoriel. Soit E ,,· un K-espace vectoriel. On dit que F ,,· est un sousespace vectoriel noté sev de E ,,· si F ,,· est un K-espace vectoriel et F E.Exemple 10.3. →0 E et E sont des sous-espaces vectoriels de E.A priori pour montrer qu’un ensemble est un sous-espace vectoriel d’un autre, il faut redémontrer la pléthore depropriétés de la définition 10.2. Heureusement la propriété suivante est là pour vous simplifier la vie :Propriété 10.3 Caractérisation d’un sous-espace vectoriel. SoitE ,,·unK-espacevectoriel.AlorsF ,,· est un sous espace vectoriel de E ,,· si et seulement si :1. F E2. →0 E F3. F est stable par combinaison linéaire : pour tout λ;µ K2 et pour tout u;v F2, λuµv FDémonstration.⇒Si F est un sev de E, alors c’est un Kev, donc par définition d’un Kev, il contient un élémentneutre pour . Or il est unique. Puisque F E, s’il y a un élément neutre dans F, c’est le même que celui deE. Donc →0 E F.⇐1. Si F est stable par combinaison linéaire, alors uv F.2. L’addition étant associative dans E elle l’est aussi dans F E.3. L’addition étant commutative dans E elle l’est aussi dans F E.4. Par hypothèse, →0 E F. Puisque →0 E est un élément neutre dans E, il l’est aussi dans F.5. Soit u F E. E étant un ev, u admet un opposé dans E. Reste à montrer que cet opposé est dans F : Ona montré que dans E, u = 1·u. Or F est stable par combinaison linéaire, donc 1·u F. Donc uadmet bien un opposé dans F.6. F est stable par multiplication par un scalaire, par hypothèse.7. Le multiplication par un scalaire est associative dans E, donc elles l’est aussi dans F.8. Le multiplication par un scalaire est distributive sur l’addition dans E, donc elles l’est aussi dans F.9. 1·u = u dans E, donc aussi dans F.Remarque 10.5.— Le premier point est souvent écrit explicitement dans la définition de F.— Le deuxième point est souvent très simple à montrer.— Il est souvent plus aisé de décomposer le troisième point en deux étapes :a Montrer que F est stable par addition : prendre deux vecteurs u et v quelconques de F et montrer quew = uv appartient bien à F.b Montrer que F est stable par multiplication par un scalaire : prendre un vecteur u quelconque de F et unscalaire λ quelconque de K et montrer que λ·u appartient F.— Le troisième point est équivalent à λ K, u;v F2, λuv F. En effet :⇒Il suffit de prendre µ = 1.⇐Avec v = →0E, nous avons que pour tout λ K et pour tout u F, λu F. Soit alors λ;µ K2 et u;v F2. Si µ = 0, alors λu+µv = λu F. Et si µ ̸= 0, λu+µv = µλµu+v= µw F, avec w = λµu+v Fpar hypothèse.10410. Espaces vectoriels

Page 111 : AlgèbreCPI12019/2020Exemple 10.4. Montrer que D =xyR2 / x+y = 0est un sous-espace vectoriel de R2.1. D R2 par définition.2. 0+0 = 0 donc →0 =00D.3.— Soit →uxyet →vx′y′deux éléments de D. Alors x, y, x′, y′ vérifient : x + y = 0 et x′ + y′ = 0.Posons →w = →u →v et montrons que →w D. Les coordonnées de →w sont →wx+x′y+y′. Calculonsalors x+x′+y+y′ = x+y+x′ +y′ = 0+0 = 0. Donc →w D.— Soit →uxyD et λ R. Alors x et y vérifient x+y = 0. Posons →w = λ→u et montrons que →w D.Les coordonnées de →w sont →wλxλy. Calculons alors λx + λy = λx + y = λ × 0 = 0. Donc→w D.Nous pouvons en déduire que D est un sous-espace vectoriel de R2.Propriété 10.4. L’intersection de deux sous-espaces vectoriels d’un K-espace vectoriel E est un sous-espace vec-toriel de E.Démonstration. Très bon exercice d’entraînement! Il n’y a rien de compliqué, c’est juste long à faire. . .□Remarque 10.6. Attention. La réunion de deux sous-espaces vectoriels n’est PAS un espace vectoriel sauf vrai-ment dans des cas très précis que vous pouvez trouver en exercices. En général le problème vient de la stabilité parl’addition qui n’est pas vérifiée.Propriété 10.5. Toute intersection finie ou infinie de sous-espaces vectoriels d’un K-espace vectoriel E est unsous-espace vectoriel de E.Démonstration. C’est une généralisation de la propriété précédente et la démonstration est à votre portée.□10. Espaces vectoriels105

Page 112 : CPI12019/2020AlgèbrePropriété 10.6 Sous-espace vectoriel engendré par une famille. Soit E un K-ev et u1 ;...;un une famille deE. L’ensemble des combinaisons linéaires de cette famille est un sous-espace vectoriel de E, appelé sous-espacevectoriel engendré par la famille u1 ;...;un. On note cet ensemble Vectu1 ,...,unDémonstration. Soit F = Vectu1,...,un— On a bien évidemment F E.— →0 E = 0·u1 +···+0·un F— Soit u et v deux éléments de F. Alors pour tout λ;µ K2, λu+µv F en raison de la propriété 10.2□Propriété 10.7. Soit E un K-ev et u1,...,un une famille de vecteurs de E. Alors Vectu1,...,un est le plus petitespace vectoriel au sens de l’inclusion contenant les vecteurs u1,...,un. On a alorsVectu1,...,un =\Fi sev de Eu1,...,unFiFiDémonstration. Dire que Vectu1,...,un est le plus petit espace vectoriel contenant les vecteurs u1,...,un signifieque si un sous-espace vectoriel H contient les vecteurs u1,...,un, alors nécessairement Vectu1,...,un H. Soitdonc H un sev de E contenant tous les vecteurs u1,...,un.Montrons que Vectu1,...,un H. Soit u Vectu1,...,un. On a alors u =ni=1λiui. Or les ui appartiennent à H etH est stable par combinaison linéaire, donc u H et Vectu1,...,un H.L’égalité est simplement une autre manière de dire que c’est le plus petit espace vectoriel contenant les vecteurs.Démontrons la tout de même par double inclusion :De la même manière que pour H, si Fi est un sev contenant les vecteurs ui, alors nécessairement Vectu1,...,un Fi. Donc on a Vectu1,...,un \Fi sev de Eu1,...,unFiFiVectu1,...,un est un sev de E qui contient les ui, donc\Fi sev de Eu1,...,unFiFi Vectu1,...,un de la même manière quepour tout ensemble A et B, AB A et AB B.Définition 10.7 Sous-espace engendré par une partie. Soit E un espace vectoriel et A E une partie de E.L’intersection de tous les sous-espaces de E qui contiennent A est un sous-espace vectoriel de E.On l’appelle le sous-espace vectoriel engendré par A. Il est noté VectA.Remarque 10.7. Si A est de cardinal fini, alors VectA est l’espace vectoriel engendré par la famille constituée detous les vecteurs de A.10610. Espaces vectoriels
Page 113 : AlgèbreCPI12019/2020Propriété 10.8. Soit E un espace vectoriel et A E une partie de E. Alors VectA est le plus petit sous-espacevectoriel de E contenant A au sens de la relation d’ordre « inclusion ».Démonstration. Si F est un sous-espace vectoriel contenant A, alors par définition VectA F puisque VectA estl’intersection de F et d’autres sous-espaces.□Propriété 10.9. Soit E un espace vectoriel, A et B deux parties de E. Si A B alors VectA VectB.Démonstration. Nous avons A B VectB. Donc VectB est un espace vectoriel contenant A, d’où VectA VectB.□10.1.4. Somme de sous-espaces vectorielsPropriété 10.10 Somme de sous-espaces vectoriels. Soit E un espace vectoriel, et F et G deux sous-espacesvectoriels de E. Alors F + G = u+v / u F et v G est le plus petit sous-espace vectoriel de E contenantF G.Démonstration. Notons S = F +G.— Vérifions d’abord que c’est bien un sous-espace vectoriel de E.a Soit u S, par définition de S, il existe x F et y G tel que u = x +y. Puisque F et G sont inclus dansE, on a x et y qui appartiennent à E. Par stabilité de E, x + y appartient à E et donc u E. On a montréque S E.b F et G étant des sev de E, ils contiennent →0 E. Or →0 E = →0 E +→0 E. Donc →0 E Sc— Soit u et u′ deux éléments de S. u = x + y avec x F et y G. u′ = x′ + y′ avec x′ F et y′ G.Posons v = u+u′ et montrons que v S. On a v = u+u′ = x+y+x′ +y′ = x+x′+y+y′ parassociativité de l’addition dans E. Or par stabilité de F et G on a x +x′ F et y+y′ G. D’oùu+u′ S. D’où la stabilité de S par l’addition.— Soit u = x + x′ S avec x F et x′ G, et λ K. Posons v = λ · u et montrons que v S. On av = λ · x + x′ = λ · x + λ · x′ par distributivité de · sur + dans E. Or par stabilité de F et G on aλ·x F et λ·x′ G. D’où λ·u S. D’où la stabilité de S par la multiplication par un scalaire.Donc S est bien un sous-espace vectoriel de E.— Reste à montrer que c’est le plus petit. Dire que S est le plus petit espace vectoriel contenant F G signifieque si un sous-espace vectoriel H contient F G, alors nécessairement S H. Supposons donc que nous avonsun sous espace H contenant F G. Tout d’abord remarquons que si F G H alors F H et G H. Soitmaintenant u = x+x′ S, montrons que u H. Nous avons x F H et x′ G H. Par stabilité de H, nousavons x+x′ H. Nous avons donc montré que u H, c’est-à-dire S H.S est donc bien le plus petit sous-espace vectoriel contenant F G.□Remarque 10.8. Nous avons donc F +G = VectF G.10. Espaces vectoriels107

Page 114 : CPI12019/2020AlgèbreDéfinition 10.8 Somme directe. Soit E un K-ev, et F et G deux sev de E. On dit que F et G sont en sommedirecte si tout élément de F +G se décompose de manière unique en somme d’un élément de F et d’un élémentde G. Dans ce cas on note la somme de F et G :F +G = F GExemple 10.5. Contre-exemple Dans R3, soit F =x;y;z R3 / x = yet G =x;y;z R3 / y = z.Le vecteur 1;3;2 se décompose de deux manières différentes sur F + G : 1;3;2 = 1;1;0 z F+0;2;2 z G=2;2;1 z F+1;1;1zGPropriété 10.11. Soit E un K-ev, et F et G deux sev de E. Alors F et G sont en somme directe si et seulement siF G =n→0 Eo.Démonstration.⇐: Supposons que F G =n→0 Eo. Soit u F +G et montrons que u se décompose de manièreunique en u = u1 +u2 avec u1 F et u2 G. Supposons queu = u1zF+ u2zG= v1zF+ v2zGOn a alors u1 v1 z F= v2 u2 z G= w F G. Or F G étant réduit au vecteur nul, on a w = →0 E, d’où u1 = v1 etu2 = v2 et l’écriture de u est unique.⇒: Supposons maintenant que F et G sont en somme directe et montrons que leur intersection est réduite auvecteur nul. Soit →u F G. On a tout simplementu =uzF+ →0 EzG= →0 EzF+ uzGPar unicité de la décomposition, on a u = →0 E.Définition 10.9 Sous-espaces supplémentaires. Soit E un K-ev, et F et G deux sev de E. On dit que F et Gsont supplémentaires dans E si tout élément de E se décompose de manière unique en somme d’un élément deF et d’un élément de G.Propriété 10.12. Soit E un K-ev, et F et G deux sev de E. Alors F et G sont supplémentaires dans E si et seulementsi F et G sont en somme directe et F +G = E. Dans ce cas on note :F G = E10810. Espaces vectoriels
Page 115 : AlgèbreCPI12019/2020Démonstration.⇒Soit x E, il se décompose de manière unique en somme d’un élement xf de f et xG de G :x = xF +xG. Donc x F +G et E F +G. Or F +G E. Donc F +G = E. De plus cette décomposition estunique, donc tout élément de F +G se décompose de manière unique sur F et G, donc F et G sont en sommedirecte.⇐Puisque F +G = E, pour tout x E, il existe xF F et xG G tels que x = xF +xG. Or F et G étant en sommedirecte, cette décomposition est unique. Finalement tout élément de E se décompose de manière unique ensomme d’un élément de F et d’un élément de G.Exemple 10.6. Dans R3, un plan passant par 0;0;0 et une droite passant par 0;0;0 non incluse dans le plansont supplémentaires.10.2. Familles de vecteurs10.2.1. Familles génératricesDéfinition 10.10 Famille génératrice. Soit E un K-ev et u1,...,un une famille de vecteurs de E. On dit queu1,...,un est une famille génératrice de E ou que les vecteurs u1,...,un engendrent E si tout vecteur u de Eest combinaison linéaire des vecteurs u1,...,un.Autrement dit E = Vectu1,...,un.Exemple 10.7. Les vecteurs 1;0;0, 0;1;0 et 0;0;1 engendrent R3. Les vecteurs 1;1;1, 0;1;1 et1;1;0 engendrent aussi R3.Propriété 10.13. Dans un espace vectoriel E, toute sur-famille d’une famille génératrice de E est génératrice de E.Démonstration. C’est assez évident. Si u1,...,un est une famille génératrice d’un espace vectoriel E, alors toutvecteur de E s’écrit comme combinaison linéaire de vecteur ui. On peut toujours rajouter des vecteurs à la famille, lesvecteurs de E continuerons à être des combinaisons linéaires de la famille il suffit de prendre 0 pour les coefficientscorrespondants aux vecteurs ajoutés.□Propriété 10.14. Soit E un K-ev et F = u1,...,un une famille génératrice. Alors F\up est une famille géné-ratrice si et seulement si up VectF\up.Démonstration.⇒: Supposons que F\up est une famille génératrice. Puisque up E, par définition d’unefamille génératrice, up s’écrit comme combinaison linéaire d’éléments de F\up, d’où up VectF\up.⇐: Puisque u1,...,un est une famille génératrice, tout vecteur de E est une combinaison linéaire des vecteurs decette famille. Or par hypothèse, up est une combinaison linéaire des autres vecteurs. Donc on peut décomposerla première combinaison linéaire sur les autres vecteurs. Démontrons-le de manière plus rigoureuse :Soit u E. On peut écrire u =ni=1λiui =ni=1i̸=pλiui +λpup. Or par hypothèse, up =nk=1k̸=pαkuk. Ainsi :u =ni=1i̸=pλiui +λpup =ni=1i̸=pλiui +λpnk=1k̸=pαkuk =ni=1i̸=pλi +λpαiui10. Espaces vectoriels109
Page 116 : CPI12019/2020AlgèbreDonc F\up est bien une famille génératrice de E.10.2.2. Familles liées, familles libresPropriété 10.15 Et définition Famille liée. Soit E un K-ev et u1,...,un une famille de vecteurs de E. Lesconditions suivantes sont équivalentes :1. L’un des vecteurs ui est combinaison linéaire des autres.2. Il existe λ1,...,λn K non tous nuls tels que :λ1u1 +···+λnun = →0 EDans ce cas, on dit que la famille u1,...,un est liéeDémonstration.1 ⇒2 : Supposons que l’un des vecteurs ui0 est combinaison linéaire des autres. Alors on peutécrireui0 =ni=1i̸=i0αiuiAinsi, α1u1 +···+αi01ui01 +1ui0 +αi0+1ui0+1 +···+αnun = →0 E.2 ⇒1 : Puisque les λi ne sont pas tous nuls, il existe i0 tel que λi0 ̸= 0. On a alorsλi0ui0 =ni=1i̸=i0λiuiou encoreui0 =ni=1i̸=i0λiλi0uiD’où l’équivalence.□Définition 10.11 Famille libre. Soit E un K-ev et u1,...,un une famille. On dit que la famille u1,...,un estlibre si elle n’est pas liée. On dit aussi que les vecteurs u1,...un sont linéairement indépendants.De manière équivalente, une famille est libre :— si et seulement si pour tous λ1,...,λn K non tous nuls, on a λ1u1 +···+λnun ̸= →0 E— si et seulement siλ1,...,λn K,λ1u1 +···+λnun = →0 E ⇒λ1 = ··· = λn = 0— si et seulement si aucun des vecteurs n’est combinaison linéaire des autres.Remarque 10.9. Une famille qui contient le vecteur nul est forcément liée.Propriété 10.16. Toute sous famille ou famille extraite d’une famille libre est libre.11010. Espaces vectoriels

Page 117 : AlgèbreCPI12019/2020Démonstration. C’est assez évident si l’on prend n’importe laquelle des formulations équivalentes de la définition.□Propriété 10.17. Soit E un K-ev, E et u1,...,un une famille libre de E. Alors u1,...,un,u est une famillelibre si et seulement si u /Vectu1,...,un.Démonstration.⇒: Si u Vectu1,...,un alors la famille u1,...,un,u est liée. Donc par contraposée, si lafamille u1,...,un,u est libre alors u /Vectu1,...,un.⇐: Toujours par contraposée, supposons que la famille u1,...,un,u est liée. Il existe n + 1 éléments de K,λ1,...,λn,λ non tous nuls tels que λ1u1 + ··· + λnun + λu = →0 E. Si λ = 0 alors nous avons une combinai-son linéaire de la famille u1,...,un nulle dont les coefficients λi sont non tous nuls, ce qui contredit le fait quela famille est libre. Donc nécessairement λ est non nul etu = ni=1λiλ uiDonc u Vectu1,...,un.10.2.3. BasesDéfinition 10.12 Base. Soit E un K-ev et u1,...,un une famille de vecteurs de E. On dit que la familleu1,...,un est une base de E si la famille est à la fois libre et génératrice.Exemple 10.8.— Soit n N, la famille ei1in où pour tout i J1;nK, ei est défini parei = 0;...;1;0;... ;0où le 1 est en ne positionest une une base de Kn appelée base canonique de Kn— La famille Xk0kn est une base de KnX, appelée base canonique de KnX. Plus généralement, lafamille XnnN est une base canonique de KX.— Si a K est fixé, alors les famillesX ak0kn et X annN sont des bases respectivement deKnX et KX.Théorème 10.2. Soit E un K-ev et u1,...,un une base de E. Alors tout vecteur u de E s’écrit de manière uniquecomme combinaison linéaire des vecteurs u1,...,un. C’est-à-dire :u E, !λ1,λ2,...,λn Kn, u = λ1u1 +λ2u2 +···+λnunDémonstration. Par définition d’une base, la famille est génératrice de E, donc il est clair que tout vecteur de Es’écrit comme combinaison linéaire de vecteurs de la famille.Puisque nous avons utilisé le côté génératrice de la famille pour montrer l’existence de la décomposition, cela seratrès certainement le côté libre de la famille qui va nous permettre de montrer l’unicité de la décomposition. Supposonsqu’un vecteur u se décompose de deux manières et montrons qu’en fait se sont les mêmes. Supposons doncu = λ1u1 +···+λnun = µ1u1 +···+µnun10. Espaces vectoriels111
Page 118 : CPI12019/2020AlgèbreOr λ1 µ1u1 +···+λn µnun = →0 E. La famille étant libre, cela signifie que chaque coefficient est nul, λ1 = µ1,. . ., λn = µn. D’où l’unicité.□Définition 10.13 Coordonnées. Soit E un K-ev et u1,...,un une base de E. On appelle coordonnées d’unvecteur u de E dans la base u1,...,un l’unique nuplet λ1,...,λn de Kn tel que :u =nk=1λkuk10.3. Espaces vectoriels de dimension finie10.3.1. Dimension d’un espace vectorielDéfinition 10.14 Espace vectoriel de dimension finie. Soit E un K-ev. On dit que E est de dimension finie s’ilexiste une famille génératrice finie de E. Dans le cas contraire E est de dimension infinieThéorème 10.3. Soit E un K-ev de dimension finie.1. Si E admet une famille libre→l 1,...,→l pde p vecteurs et une famille génératrice →g 1,...,→g m de mvecteurs, alors p m toute famille libre est plus petite que toute famille génératrice.2. Si de plus E admet une base →e 1,...,→e n de n vecteurs, alors p n m.3. Enfin sous les conditions précédentes,— Si p = n, alors→l 1,...,→l pest une base de E.— Si m = n, alors →g 1,...,→g m est une base de E.Démonstration.1. Admis.2. Cela découle du point précédent.3.— Supposons que p = n et montrons que la famille→l 1,...,→l nest génératrice. Soit →u E. D’après lepoint précédent, la famille→l 1,...,→l n,→une peut pas être libre, elle est donc liée. Il existe donc unecombinaison linéaire à coefficients non tous nuls égale au vecteur nul. Par un raisonnement analogue quecelui fait dans la démonstration de la propriété 10.17, le coefficient de →u est non nul. On en déduit doncque →u est une combinaison linéaire des →u 1,...,→u n.— Supposons que n = m et montrons que la famille →g 1,...,→g n est libre. Si cette famille n’était pas libre,l’un des vecteurs supposons gn pour simplifier serait combinaison linéaire des autres et donc tout vecteurde E serait combinaison linéaire de →g 1,...,→g n1. Cela contredirait donc le point précédent. Donc lafamille est libre.11210. Espaces vectoriels

Page 119 : AlgèbreCPI12019/2020Théorème 10.4 Fondamental. Soit E un K-ev pas forcément de dimension finie. Si→l 1,...,→l pest unefamille libre de E et →g 1,...,→g m une famille génératrice de E, alors il existe une base B de E de la formeB =→l 1,...,→l p,→l p+1,...,→l noù les vecteurs →l p+1, . . ., →l n sont pris dans la famille →g 1,...,→g m.Démonstration. Admis. On part de la famille libre et on construit par récurrence, à l’aide de la propriété 10.17, desfamilles libres, jusqu’à obtenir une famille génératrice.□Corollaire 10.2. Tout espace vectoriel de dimension finie non réduit àn→0 Eopossède une base.Démonstration. Par définition, un tel espace possède une famille génératrice G . Soit →u ̸= 0E G . La famille →u est libre. Par application du théorème 10.4, on peut la compléter en une base de E.□Corollaire 10.3 Théorème de la base incomplète. Soit E un K-ev de dimension finie et→l 1,...,→l pune fa-mille libre de E. Alors on peut compléter cette famille en une base→l 1,...,→l p,→l p+1,...,→l nde E.Démonstration. Par définition, E possède une famille génératrice finie G . Donc en utilisant le théorème 10.4, onpeut compléter la famille libre en une base.□Corollaire 10.4. Soit E un K-ev et →g 1,...,→g m une famille génératrice de E. Alors on peut extraire de cette familleune base, c’est-à-dire, qu’on peut choisir des éléments parmi →g 1,...,→g m de façon à former une base de E.Démonstration. Ce n’est qu’un cas particulier du théorème fondamental 10.4.□Théorème 10.5. Soit E un K-ev de dimension finie non nulle. Alors toutes les bases de E ont même cardinal.Démonstration. Puisque E est de dimension finie il possède au moins une base. Soit B1 et B2 deux bases de E.Comme B1 est libre et B2 génératrice, on a CardB1 CardB2. De la même manière en intervertissant les bases,on a CardB2 CardB1. D’où l’égalité.□Ce théorème et le corollaire 10.2 nous permettent de justifier la définition suivante :10. Espaces vectoriels113

Page 120 : CPI12019/2020AlgèbreDéfinition 10.15 Dimension d’un espace vectoriel.— Si E =n→0 Eoon dit que E est de dimension 0 et on note dim E = 0.— Si E est un espace vectoriel de dimension finie non réduit àn→0 Eo, on appelle dimension de E le cardinald’une base de E et on le note dim E.Propriété 10.18. Soit E un K-ev de dimension n et F une famille de p vecteurs de E.1. Si F est libre alors p n et on a égalité si et seulement si F est une base de E. Toute famille libre de nvecteurs de E est une base de E.2. Si F est génératrice alors p n et on a égalité si et seulement si F est une base de E. Toute famillegénératrice de n vecteurs de E est une base de E.Démonstration. À vous de jouer.□Remarque 10.10. En résumé, si dimE = n et X est une famille de n vecteurs de E, alors on aX libre ⇔X génératrice ⇔X base10.3.2. Dimension d’un sous-espace vectorielPropriété 10.19. Soit E un K-ev de dimension finie et F un sev de E. Alors F est de dimension finie et dimF dimE. De plus dimF = dimE si et seulement si F = E.Démonstration. Admis.□Propriété 10.20 Formule de Grassmann. Soit F et G deux sev d’un K-ev tous les deux dimension finie. AlorsF +G et F G sont de dimension finie et :dimF +G = dimF+dimGdimF GDémonstration. Admis. On part d’une base de F G que l’on complète en une base de F et en une base de G. Onmontre alors que la famille contenant tous les vecteurs ainsi obtenus est une base de F +G.□Définition 10.16 Rang d’une famille de vecteurs. Soit E un K-espace vectoriel pas forcément de dimensionfinie et F une famille finie de vecteurs de E. On appelle rang de la famille F, noté rgF, la dimension finiede VectF.11410. Espaces vectoriels
Page 121 : AlgèbreCPI12019/202010.3.3. Sous-espace vectoriels supplémentaires en dimension finiePropriété 10.21. Soit E un K-ev de dimension finie, et F et G deux sev de E. Les trois propriétés suivantes sontéquivalentes :i E = F Gii dimE = dimF+dimG et F G =n→0 Eoiii dimE = dimF+dimG et E = F +GDémonstration. On montre i ⇒ii ⇒iii ⇒ii ⇒ii : Puisque E = F G, on a E = F + G et F G =n→0 Eo. Donc dimE = dimF + G = dimF +dimGdimF Gz=0= dimF+dimG.ii ⇒iii : Puisque dimE = dimF + dimG et F G =n→0 Eo, on a dimF + G = dimF + dimG dimF Gz=0= dimF+dimG = dimE. Donc F +G = E.iii ⇒i : Puisque dimE = dimF+dimG et E = F +G, on a dimF G = dimF+dimGdimF +G =dimF+dimGdimE = 0. Donc F G =n→0 Eo.Propriété 10.22. Soit E un K-ev de dimension finie. Alors tout sev F de E admet un sev supplémentaire G. Deplus :dimG = dimEdimFDémonstration. On pose n = dimE. Soit F un sev de E, et →e 1,...,→e p une base de F. On la complète en unebase →e 1,...,→e p,→e p+1,...,→e n de E.Soit G = Vect→e p+1,...,→e n. On vérifie facilement grâce à la propriété 10.21 que G convient. En effet, on adimE = dimF+dimG, et de plus si u E, on a :u = λ1e1 +···+λpepzF+λp+1ep+1 +···+λnenzGDonc u F +G□10. Espaces vectoriels115
Page 122 :

Page 123 : 11. Applications linéairesDans tout ce chapitre K désigne le corps R ou le corps C. Sauf mention contraire, les K-espaces vectoriels aurontpour loi + et ·. Les ensembles E ;+;· et F ;+;· désigneront des K-espaces vectoriels. Afin d’alléger les notations,le produit externe sera omis.11.1. Définitions et propriétésDéfinition 11.1 Application linéaire. On appelle application linéaire ou morphisme de K-espaces vectorielsune application f de E dans F vérifiant :1. x;y E2, fx+y = fx+ fy2. x E, λ K, fλx = λ fx.On note L E ,F l’ensemble des applications linéaires de E dans F.Définition 11.2 Isomorphisme, Endomorphisme, Automorphisme. On appelle isomorphisme une applica-tion linéaire bijective.On appelle endomorphisme de E une application linéaire de E dans E.On appelle automorphisme de E un endomorphisme bijectif.On note IsomE ,F, L E et AutE l’ensemble, respectivement, des isomorphimes de E dans F, des endomor-phismes de E et des automorphismes de E.Propriété 11.1. Soit f L E ,F. On a :1. f0E = 0F.2. Pour tout x E, fx = fx.Démonstration.1. Nous avons pour tout y E, fy = f0E +y = f0E+ fy. D’où le résultat.2. Cela provient directement de la définition, avec λ = 1 et des propriétés vues au chapitre précédent : fx =f1x = 1 fx = fx.Propriété 11.2 Caractérisation d’une application linéaire. Une application f de E dans F est linéaire si etseulement six,y E, λ K, fx+λy = fx+λ fyDémonstration.⇒L’application linéaire conserve la somme donc fx +λy = fx+ fλy. Elle conserve aussile produit externe, donc fλy = λ fy. Ainsi fx+λy = fx+λ fy.117

Page 124 : CPI12019/2020Algèbre⇐En prenant λ = 1, l’application conserve la somme. En prenant x = 0E, nous avons fλy = f0E+λ fy. Maisd’après la propriété précédente, f0E = 0F, donc l’application conserve le produit externe.11.2. Image, NoyauPropriété 11.3 Image d’un sous-espace. Soit f L E ,F. Si A est un sous-espace vectoriel de E, alors fAest un sous-espace vectoriel de F.Démonstration. Puisque A contient 0E, l’ensemble fA contient f0E = 0F. Ainsi fA est non vide.Soit x,y fA2. Alors il existe a;b A2, tel que x = fa et y = fb. Ainsi, pour tout λ K, x+λy = fa+λ fb. Nous avons alors, par linéarité de f, x + λy = fa + fλb = fa+ λb. Mais comme A est un sev de E, ils’ensuit que a+λb A et par conséquent, x+λy fA.□Définition 11.3 Image d’une application linéaire. Soit f L E ,F. L’ensemble fE est un sous-espacevectoriel de F, appelé image de f et noté Im f.Remarque 11.1. Une application linéaire f L E ,F est surjective si et seulement si Im f = F.Propriété 11.4 Image réciproque d’un sous-espace. Soit f L E ,F. Si B est un sous-espace vectoriel de F,alors f 1B est un sous-espace vectoriel de E.Démonstration. f0E = 0F B, donc 0E f 1B. Soit x;y f 1B2 et λ K. Par linéarité de f, on afx+λy = fx+λ fy B car fx et fy sont dans B. Ainsi, x+λy f 1B.□Définition 11.4 Noyau. Soit f L E ,F. On appelle noyau de f, noté Ker f, le sous-espace vectorielf 1 0F E.Théorème 11.1 Caractérisation de l’injectivité. Une application linéaire f de E dans F est injective si et seule-ment si son noyau est le sous-espace nul de E :f injective ⇔Ker f = 0EDémonstration.⇒Soit x Ker f. Nous avons donc f0E = 0F = fx. Par injectivité de f, x = 0E.⇐Soit Ker f = 0E, et x et y tels que fx = fy. Par linéarité de f, nous avons fx y = fx fy = 0F.Donc xy Ker f, c’est-à-dire xy = 0E, soit x = y. D’où l’injectivité de f.11811. Applications linéaires

Page 125 : AlgèbreCPI12019/2020Propriété 11.5. Soit f L E ,F et uiiI une famille génératrice de E. Alors fuiiI est une famille généra-trice de Im f.Démonstration. Soit y Im f. Il existe x E tel que fx = y. Or il existe une famille λiiI de scalaire, de supportfini I, telle quex = iIλiuiD’oùy =iIλi fui Vect fuiiIDe plus, tout élément de Vect fuiiIappartient à Im f. Donc Im f = Vect fuiiI.□Propriété 11.6. Soit f L E ,F.1. Si uiiI est une famille liée de E, alors fuiiI est une famille liée de F.2. Si f est injective et uiiI est une famille libre de E, alors fuiiI est libre dans F.Démonstration.1. Il existe une famille de scalaire λiiI de support fini non vide telle queiIλiui = 0Ed’oùiIλi fui = 0FD’où le résultat.2. Soit uiiI une famille libre d’éléments de E. Soit une famille de scalaire λiiI de support fini, telle queiIλi fui = 0F. Cette égalité s’écrit fiIλiui= 0F = f0E. Ainsi, par injectivité de f, iIλiui = 0E. Lafamille uiiI étant libre, pour tout i I, λi = 0 et la famille fuiiI est libre.Théorème 11.2 Détermination d’une application linéaire. Soit B = biiI une base de E et C = ciiI unefamille de vecteurs de F.1. Il existe une et une seule application linéaire f de E dans F telle quei I, fbi = ciCette application linéaire f vérifie :2. f est injective si et seulement si C est une famille libre.3. f est surjective si et seulement si C est une famille génératrice de F.4. f est un isomorphisme si et seulement si C est une base de F.Démonstration.1. Unicité : Soit x E et xiiI la famille de ses coordonnées dans la base B. Par linéarité def, on a fx = fiIxibi= iIxi fbi = iIxici. L’image fx est donc entièrement déterminée par lescoordonnées de x, d’où l’unicité de f.11. Applications linéaires119
Page 126 : CPI12019/2020AlgèbreExistence Soit f l’application définie par x 7→xIxici où xiiI est la famille des coordonnées de x dans labase B.Étant donné λ K, on sait que λx a pour coordonnées λxiiI donc :fλx = iIλxici = λ iIxici!= λ fxÉtant donné x et y de coordonnées xiiI et yiiI, celles de x+y sont xi +yiiI. On a donc fx+y =iIxi +yici = iIxici + iIyici = fx+ fy, ce qui montre la linéarité de f. Pour vérifier que fbk = ckpour k I, il suffit de remarquer que les coordonnées de bk sont βiiI avec βk = 1 et βi = 0 pour touti ̸= k.2. Supposons ciiI libre. Pour x = iIxibi, on a fx = iIxici. Ainsi, fx = 0 donne i I,xi = 0 et donc x = 0E.Il en résulte Ker f = 0E : f est injective.La réciproque a été vue au deuxième point de la propriété 11.6.3. D’après la propriété 11.5, la fonction f est surjective si et seulement si C est une famille génératrice de F.4. Cela découle simplement des deux points précédents.Remarque 11.2. Le premier point signifie qu’une application linéaire est entièrement caractérisée par les images desvecteurs d’une base.11.3. Structures11.3.1. L E ;FThéorème 11.3 Espace vectoriel L E ;F. L’ensemble L E ;F est un K-espace vectoriel.Démonstration. Montrons que c’est un sous-espace vectoriel deFE ;+;·qui est un K-espace vectoriel de vecteurnul θEF :E→Fx7→0F.Soit f et g deux éléments de L E ;F et λ K. Pour tout x;y E2 et tout α K, f +λgx+αy = fx+αy+λ·gx+αy= fx+αy+λgx+αy= fx+αfy+λgx+αgy= fx+λgx +α fy+λgy= f +λgx+α f +λgyD’où f +λg est linéaire.□Théorème 11.4 Composition. Soit E, F et G des K-espaces vectoriels, f L E ;F et g L F ;G. Alorsg◦f L E ;G.12011. Applications linéaires

Page 127 : AlgèbreCPI12019/2020Démonstration. Nous avons bien évidemment que g ◦f est une application de E dans G. Il ne reste donc qu’àdémontrer la linéarité. Soit λ K et x;y E2. Alorsg◦fx+λy = g fx+λy= g fx+λ fy= g fx+λg fy= g◦fx+λg◦fyD’où la linéarité.□Propriété 11.7. Soit E, F et G des K-espaces vectoriels, et h L E ;F et k L F ;G. Alors les applications :Ld :L E ;F→L E ;Gf7→k ◦fetLg :L F ;G→L E ;Gg7→g◦hsont linéaires.On dira que l’application L :L E ;F×L F ;G→L E ;G f ;g7→g◦fest bilinéaire linéaire par rapport à cha-cune des deux variables.Démonstration. Cela veut simplement dire queα K; f1 ; f2 L E ;F2 , k ◦ f1 +α· f2 = k ◦f1 +α·k ◦f2α K; g1 ;g2 L F ;G2 , g1 +α·g2◦h = g1 ◦h+α·g2 ◦hCe qui est évident.□Propriété 11.8. Soit E, F et G des K-espaces vectoriels, et f L E ;F et g L F ;G. Alors1. Img◦f Img et Ker f Kerg◦f2. g◦f = θEG ⇔Im f Kerg la fonction θEG étant la fonction nulle qui à tout vecteur de E associe le vecteurnul de G, 0G.Démonstration.1. Puisque fE F, on déduit que Img◦f = g◦fE = g fE gF = Img.Soit x Ker f. Alors fx = 0F et g fx = gOF = OG, donc x Kerg◦f.2. Soit yinIm f. Il existe x E tel que y = fx, d’où gy = g fx = 0.Réciproquement, soit x E, alors fx Im f Kerg, donc g◦fx = 0.11.3.2. L EThéorème 11.5 Anneau. Le triplet L E;+;◦ est un anneau.11. Applications linéaires121

Page 128 : CPI12019/2020AlgèbreDémonstration. L E = L E ;E, donc L E;+;· est un K-espace vectoriel, d’où L E;+ est un groupeabélien.De plus, la loi ◦est associative, admet IdE pour élément neutre, et pour tous f, g et h dans L E, on a f ◦g+h =f ◦g+ f ◦h et g+h◦f = g◦f +h◦f.□Remarque 11.3. Attention Cet anneau n’est pas commutatif. Par exemple, soit p : x;y 7→x;0 et s : x;y 7→y;x. Ces deux applications sont linéaires et pour tout x;y R2,p◦sx,y = py,x = y;0;s◦px,y = sx,0 = 0;xDéfinition 11.5 Itérés, nilpotent. Soit f L E. On pose f 0 = IdE, f 1 = f, et pour tout n N, f n+1 = f n ◦f.Pour tout n N, les endomorphismes f n sont appelés itérés de f.On dit que f L E est nilpotent lorsque l’un de ses itérés est l’endomorphisme nul sur E.Remarque 11.4. Si f et g sont à valeurs dans un espace E qui n’est ni R ni C, cela n’a pas de sens de parler deproduit f ×g. Il ne faut donc pas confondre f 2 = f ◦f avec f × f qui n’a pas de sens en général.Exemple 11.1. Calculs dans L E Soit f et g deux endomorphismes de E.1. IdE 3f2 = Id2E 3f ◦IdE 3IdE ◦f +9f 2 = IdE 6f +9f 22. f +g2 = f 2 + f ◦g+g◦f +g23. f g◦ f +g = f 2 g2 + f ◦gg◦f4. f 2 5f +6IdE = f 3IdE◦ f 2IdE = f 2IdE◦ f 3IdERemarque 11.5. Les identités remarquables ne sont pas les mêmes car nous avons vu que l’anneau n’est pascommutatif. Pour le dernier, l’idée est de factoriser le polynôme X2 5X +6 = X 2X 3.11.3.3. AutE et GLEThéorème 11.6 Isomorphisme réciproque. Soit f un isomorphisme de E dans F. Alors l’application f 1 de Fdans E est linéaire et est donc un isomorphisme de F dans E.Démonstration. Soit y1 ;y2 F et λ K. L’application f étant bijective, il existe des antécédents par f, uniques,x1 et x2 dans E de y1 et y2. Nous avons alorsy1 +λy2 = fx1+λ fx2 = fx1 +λx2Ainsi, x1 +λx2 = f 1y1 +λy2, ce qui montre quef 1y1 +λy2 = f 1y1+λ f 1y2D’où la linéarité de f 1.□12211. Applications linéaires

Page 129 : AlgèbreCPI12019/2020Théorème 11.7 Groupe linéaire de E. Le couple AutE;◦ est le groupe des éléments inversibles de l’anneauL E;+;◦ appelé groupe linéaire de E et noté GLE.Démonstration.1. Montrons que les éléments inversibles de L E;+;◦ sont dans AutE;◦. Si f L Eest inversible alors il existe g L E tel que f ◦g = g ◦f = IdE, donc nécessairement f est injective etsurjective. C’est donc bien un automorphisme de E.2. Montrons maintenant que les automorphismes de E sont inversibles dans L E. Si f est un automorphisme deE, alors c’est un isomorphisme de E dans E, donc d’après le théorème 11.6 précédent f 1 est un isomorphismede E dans E. Donc f admet un symétrique pour la loi ◦ dans L E, c’est donc bien un élément inversible deL E.Définition 11.6 Espaces isomorphes. Deux espaces vectoriels E et F sont dit isomorphes si et seulement si ilexiste un isomorphisme de E dans F.Remarque 11.6. D’après le théorème 11.6, s’il existe un isomorphisme f de E dans F, alors f 1 est un isomorphismede F dans E. La définition d’espaces isomorphes ne dépend donc pas de l’ordre dans lequel on considère E et F.Lemme 11.1. Soit f L E ;F et H un sous-espace vectoriel de E et g = fH. Alors Kerg = H Ker f.Démonstration. Un vecteur x appartient à Kerg si et seulement si il appartient à H et si gx = 0E, c’est à dire x Het fx = 0E.□Théorème 11.8 Théorème noyau-image. Soit f L E ;F. Alors Im f est isomorphe à tout supplémentaire deKer f.Démonstration.1. Soit H un supplémentaire de Ker f et g = fH. Le noyau de g est H Ker f = 0E. Il s’ensuitque g est injective. Or g est surjective sur son image, on veut donc montrer que Img = Im f.2. Pour tout y Im f, il existe x E tel que fx = y. Puisque H +Ker f = E, il existe h;k H ×Ker f tel quex = h+k. Il s’ensuit que y = fh+ fk = fh = gh et Im f Img.Comme, bien entendu, Img Im f, il vient Img = Im f.3. L’application g : H →Im f induite par g, est donc un isomorphisme de H vers Im f.11.4. Applications linéaires en dimension finie11.4.1. DimensionsPropriété 11.9. Des K-espaces vectoriels de dimension finies sont isomorphes si et seulement si ils ont la mêmedimension.11. Applications linéaires123
Page 130 : CPI12019/2020AlgèbreDémonstration.⇐Soit E et F sont deux espaces vectoriels de dimension finie n, et B = bi1in et C = ci1indes bases de E et F. L’application linéaire ϕ telle que i, ϕbi = ci est bijective d’après le théorème 11.2.⇒S’il existe un isomorphisme ϕ L E ;F, alors l’image ϕB = ϕbi1in est une base de F toujours lethéorème 11.2, et on a ainsi dimF = n = dimE.Théorème 11.9 Dimension de L E ;F. Si E et F sont deux K espaces vectoriels de dimensions finies, l’espacevectoriel L E ;F est de dimension finie etdimL E ;F = dimE×dimFDémonstration. Soit ej1jp et fi1in des bases de E et F respectivement.On considère ϕi,j L E ;F caractérisée par k J1; pK, ϕi,jek = δ j,k fi, où δi,j = 0 si i ̸= j et δi,i = 1 δi,j est lesymbole de Kronecker. Vérifions que ϕi,ji;jJ1;nK×J1;pK est une base de L E ;F.Soit u L E ;F. On sait que u est caractérisée par la donnée des uej pour 1 j p. Posons donc, pour tout j J1; pK, uej =ni=1ai,j fi. Ainsi, u est caractérisée par la famille de scalaires ai,j1in1jp. Posons alors v =ni=1pj=1ai,jϕi,j.Pour tout k J1; pK, on a vek =ni=1pj=1ai,jϕi,jek et, comme ϕi,jek = δ j,k fi, nous avons ϕi,kek = fi et lesautres termes sont nuls. Donc il reste vek =ni=1ai,kϕi,kek =ni=1ai,k fi = uek. Il en résulte que u = v, donc la familleϕi,ji;jJ1;nK×J1;pK est génératrice de L E ;F.Si ai,j1in1jpest une famille de scalaires telle queni=1pj=1ai,jϕi,j = 0L E;F, le calcul précédent montre que k J1; pK,ni=1ai,k fi = 0F.Or fi1in est une base, donc k J1; pK, i J1;nK, ai,k = 0. Il en résulte que la famille ϕi,ji;jJ1;nK×J1;pKest libre et finalement c’est une base de L E ;F.Par conséquent dimL E ;F = Cardϕi,ji;jJ1;nK×J1;pK = np.□11.4.2. RangDéfinition 11.7 Rang. Soit f L E ;F. Si Im f est de dimension finie, sa dimension est appelée rang de f.On le note rg f.Théorème 11.10 Théorème du rang. Soit f L E ;F. Si E est de dimension finie, alors Im f est de dimensionfinie, et on a :dimIm f+dimKer f = dimEOu sous forme équivalente :rg f = dimEdimKer f12411. Applications linéaires

Page 131 : AlgèbreCPI12019/2020Démonstration. Soit H un supplémentaire de Ker f dans E. D’après le théorème noyau-image 11.8, Im f est iso-morphe à H. On en déduit que dimIm f = dimH, donc quedimIm f = dimEdimKer fD’où le résultat.□Corollaire 11.1. Soit E et F deux K-espaces vectoriels et f L E ;F.1. Si F est de dimension finie, alors f est de rang fini et rg f dimF, avec égalité si et seulement si f estsurjective.2. Si E est de dimension finie, alors f est de rang fini et rg f dimE, avec égalité si et seulement si f estinjective.Démonstration.1. Comme Im f F, alors Im f est de dimension finie et rg f = dimIm f dimF, avecégalité si et seulement si Im f = F, c’est-à-dire si et seulement si f est surjective.2. Cela découle directement du théorème du rang 11.10. Avec égalité si et seulement dimKer f = 0.Corollaire 11.2. Soit E et F deux K-espaces vectoriels de dimensions finies et f L E ;F.1. Si f est injective alors dimE dimF, avec égalité si et seulement si f est bijective.2. Si f est surjective alors dimF dimE, avec égalité si et seulement si f est bijective.Démonstration. Cela découle directement du corollaire précédent 11.1.1. Si f est injective alors dimKer f = 0 et dimE = rg f dimF. Il y a égalité si et seulement si rg f =dimF, c’est-à-dire si et seulement si f est surjective.2. Si f est surjective alors dimF = rg f dimE. Il y a égalité si et seulement si rg f = dimE, c’est-à-diresi et seulement f est injective.Corollaire 11.3 Application linéaire entre espaces vectoriels de mêmes dimensions finies. Soit E et F deuxK-espaces vectoriels de dimensions finies et f L E ;F. Si dimE = dimF, alors :f bijective ⇔f injective ⇔f surjectiveDémonstration. Cela découle des corollaires précédents une démonstration directe avec le théorème du rang a étévue en T.D..□11. Applications linéaires125
Page 132 :

Page 133 : 12. MatricesLe possible est une matrice formidable.Victor HugoL’ensemble K désigne soit R soit C, n et p sont des entiers naturels non nuls.12.1. Définitions12.1.1. Types de matricesDéfinition 12.1 Matrice. Soit n, p N. On appelle matrice à n lignes et p colonnes à coefficients dans K untableau de nombres que l’on écrit sous la forme :M =a1,1...a1,p.........an,1...an,pOn dit que M est de taille n× p.Afin de simplifier la notation on note parfois M = ai,j 1in1jp .On note Mn,pK l’ensemble des matrices à n lignes et p colonnes à coefficients dans K.Définition 12.2 Vecteur ligne / Vecteur colonne. Une matrice de taille n×1 est appelée vecteur colonne.Une matrice de taille 1× p est appelée vecteur ligne.Remarque 12.1. Une matrice n’ayant qu’une colonne est assimilée à un vecteur que l’on représente en colonne etune matrice ayant une seule ligne est assimilée à un vecteur que l’on représente en lignes.Définition 12.3 Matrice nulle. On appelle matrice nulle de taille n× p la matrice de taille n× p dont tous lescoefficients sont nuls. On la note 0n,p.Définition 12.4 Matrice carrée. On appelle matrice carrée de taille n une matrice à n lignes et n colonnes.On note MnK l’ensemble des matrices carrées de taille n à coefficients dans K.127
Page 134 : CPI12019/2020AlgèbreDéfinition 12.5 Matrice diagonale. On appelle matrice diagonale une matrice carrée dont tous les élémentsen dehors de la diagonale sont nuls.D = diaga1,1,...,an,n =a1,10...00a2,2...............00...0an,nExemple 12.1. La matriceM =10000030000000000075000002πest une matrice diagonale de taille 5.Définition 12.6 Matrice identité. On appelle matrice identité de taille n la matrice diagonale de taille n donttous les coefficients valent 1 :In = diag1,...,1 =10...001...............00...0112812. Matrices
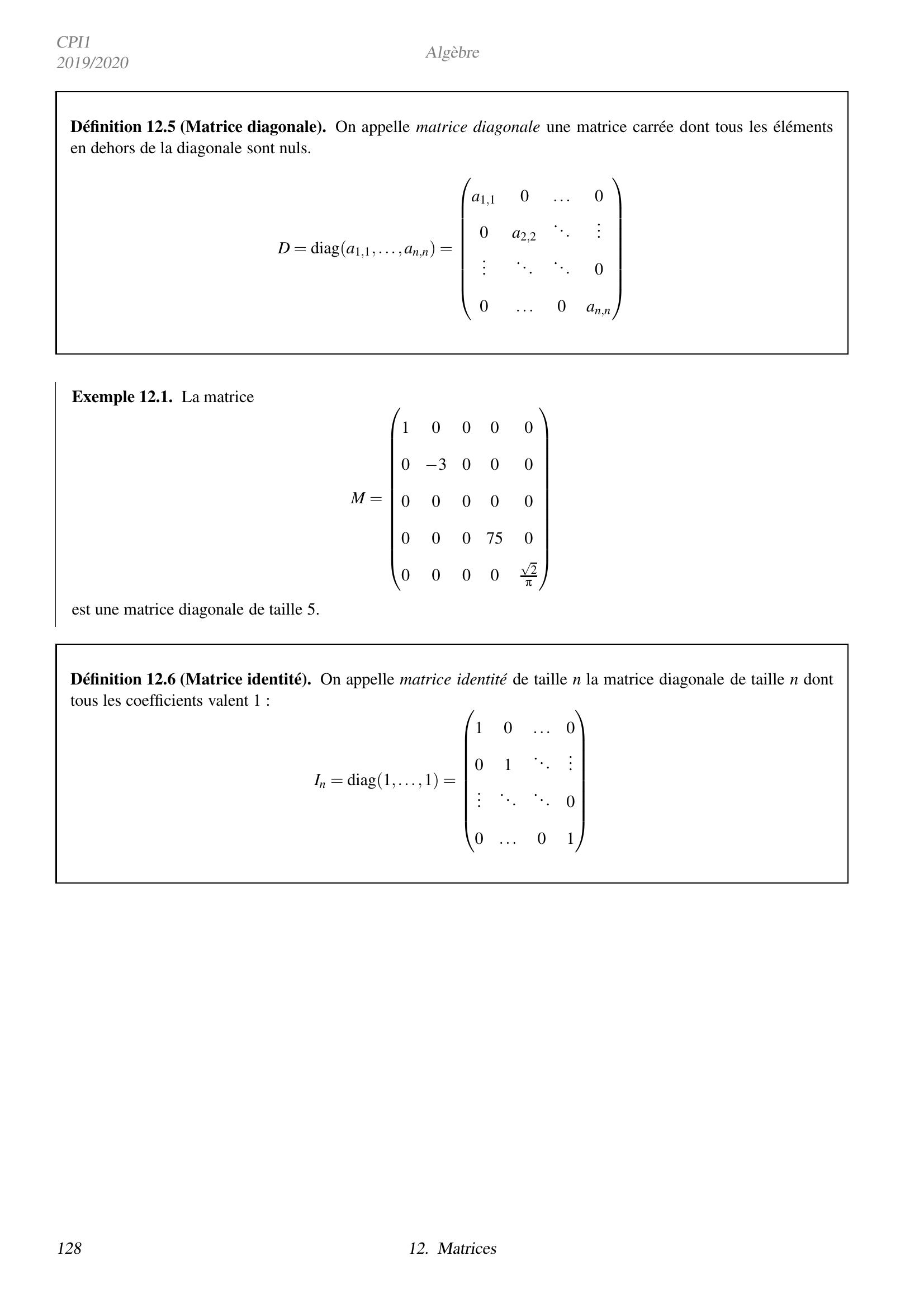
Page 135 : AlgèbreCPI12019/2020Définition 12.7 Matrice triangulaire. On appelle matrice triangulaire supérieure une matrice carrée dont tousles éléments en dessous de la diagonales sont nuls.a1,1a1,2...a1,n0a22...............an1,n0...0an,nOn appelle matrice triangulaire inférieure une matrice carrée dont tous les éléments au dessus de la diagonalessont nuls.a1,10...0a2,1a2,2...............0an,1...an,n1an,nOn appelle matrice triangulaire une matrice qui est soit triangulaire inférieure soit triangulaire supérieure.Exemple 12.2. La matriceMs =150210347100031500075200002πest triangulaire supérieure.La matriceMi =1000020000343500121750470352πest triangulaire inférieure.Les matrices Ms et Mi sont toutes les deux des matrices triangulaires.12. Matrices129
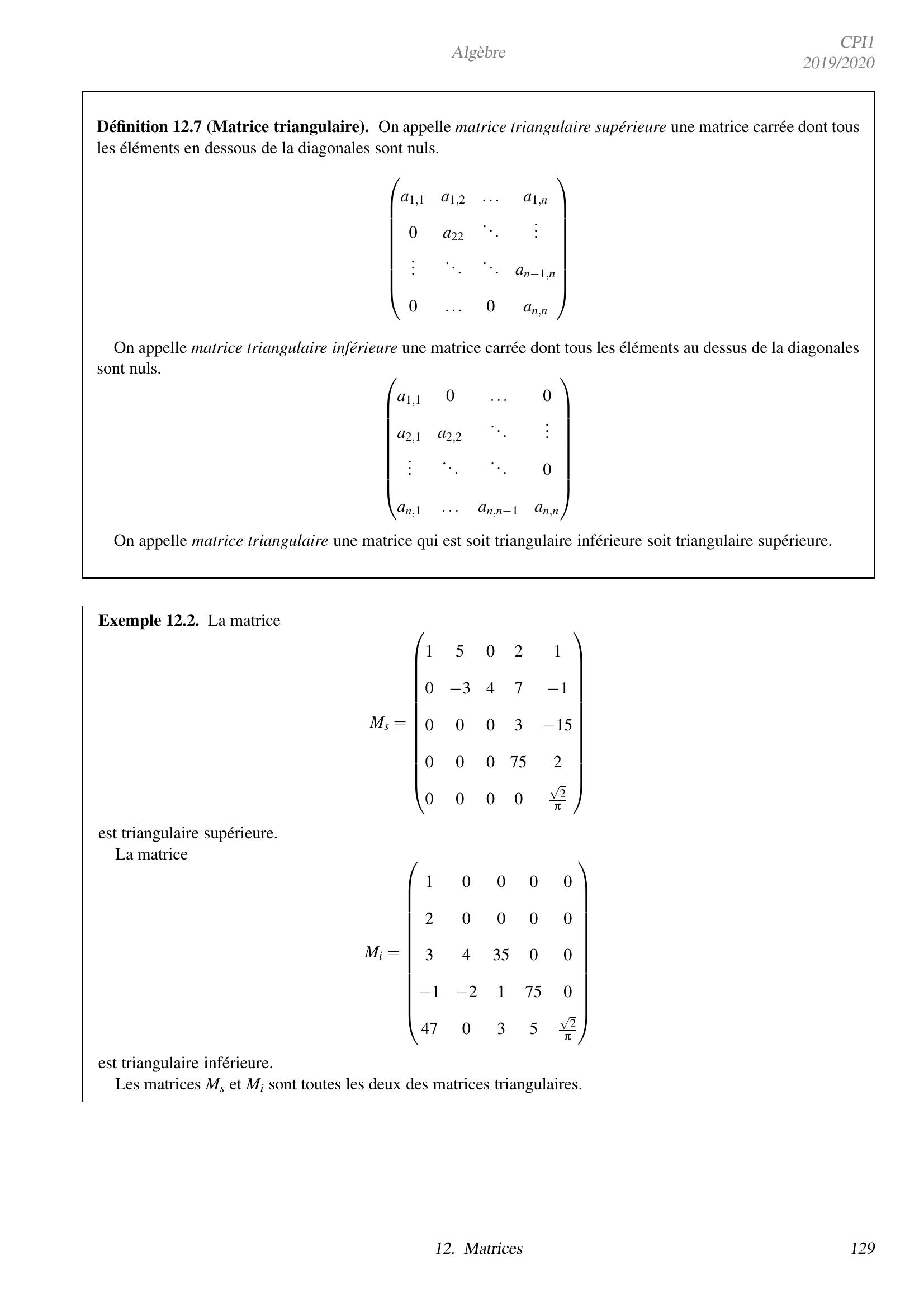
Page 136 : CPI12019/2020Algèbre12.1.2. OpérationsDéfinition 12.8 Somme de matrices. Soit A = ai,j 1in1jp et B = bi,j 1in1jp deux matrices de tailles n× p.On note A+B = C = ci,j 1in1jp la matrice de taille n× p définie par1 i n, 1 j n, ci,j = ai,j +bi,jExemple 12.3.123321+281123=3104242Remarque 12.2. Cela n’a strictement AUCUN SENS d’additionner deux matrices n’ayant pas la même taille.Définition 12.9 Multiplication par un scalaire. Soit A = ai,j 1in1jp une matrice de taille n× p et λ K.On note λA = C = ci,j 1in1jp la matrice de taille n× p définie par1 i n, 1 j n, ci,j = λai,jExemple 12.4.3123321=369963Définition 12.10 Produit d’une matrice par un vecteur colonne. Soit A = ai,j 1in1jp une matrice de taille n×p et B = bl1lp un vecteur colonne de taille p. On note AB = C = ci1in le vecteur colonne de taille n définipar1 i n, ci =pk=1ai,kbkRemarque 12.3. On remarque que l’élément à la ligne i du produit est tout simplement le produit scalaire de la i-ièmeligne de A par le vecteur B. Autrement dit, le produit scalaire entre deux vecteurs est égal au produit matriciel d’unvecteur ligne par un vecteur colonne.13012. Matrices

Page 137 : AlgèbreCPI12019/2020Exemple 12.5.2431233212×1+4×2+3×32×3+4×2+3×1=31Remarque 12.4.— Remarquez que le nombre de lignes de B doit absolument être égal au nombre de colonnes de A.— En fait, le vecteur produit est la combinaison linéaire des colonnes de A, les coefficients étant ceux de B. Eneffet, sur l’exemple précédent31= 213422+331— Soit A = ai,j 1in1jp une matrice de taille n× p et X = xi1ip un vecteur colonne de taille p. Alors le produitAX donne un vecteur colonne dont la ligne i est égale à ai1x1 + ...ai,pxp. C’est la raison pour laquelle on peutécrire un système sous la forme AX = B où A est la matrice associée au système, X est le vecteur contenant lesinconnues et B le vecteur du second membre.Définition 12.11 Produit de deux matrices. Soit A = ai,j 1in1jp une matrice de taille n × p et B = bi,j 1ip1jmune matrice de taille p×m. On note AB = C = ci,j 1in1jm la matrice de taille n×m définie par1 i n, 1 j m, cij =pk=1aikbk jExemple 12.6.21424231311212332138710181710Remarque 12.5.— Remarquez qu’encore une fois le nombre de lignes de B doit absolument être égal au nombre de colonnes de A.— On remarque que la j-ième colonne du produit AB est tout simplement le produit de A par la j-ième colonne deB.— De même, la i-ième ligne du produit AB est tout simplement le produit de la i-ième ligne de A par B.12. Matrices131

Page 138 : CPI12019/2020Algèbre— Le nombre de lignes de AB est égal au nombre de lignes de A et le nombre de colonnes de AB est égal au nombrede colonnes de B.Remarque 12.6. Attention! Le produit de matrices n’a pas vraiment les mêmes propriétés que le produit de nombres.1. Le produit de deux matrices n’est pas commutatif, c’est-à-dire que AB ̸= BA. Tout d’abord si les matrices nesont pas carrées les deux produits n’ont en général pas de sens en même temps. Si par contre les deux matricessont carrées, les deux produits ont un sens, mais ne sont en général tout de même pas égaux.Exemple 12.7.1321351413477et3514132101776De même,1232311423117101453112et14231112323165522. Nous pouvons avoir un produit nul AB = 0n,p sans pour autant que A ou B soit nulle.13212. Matrices
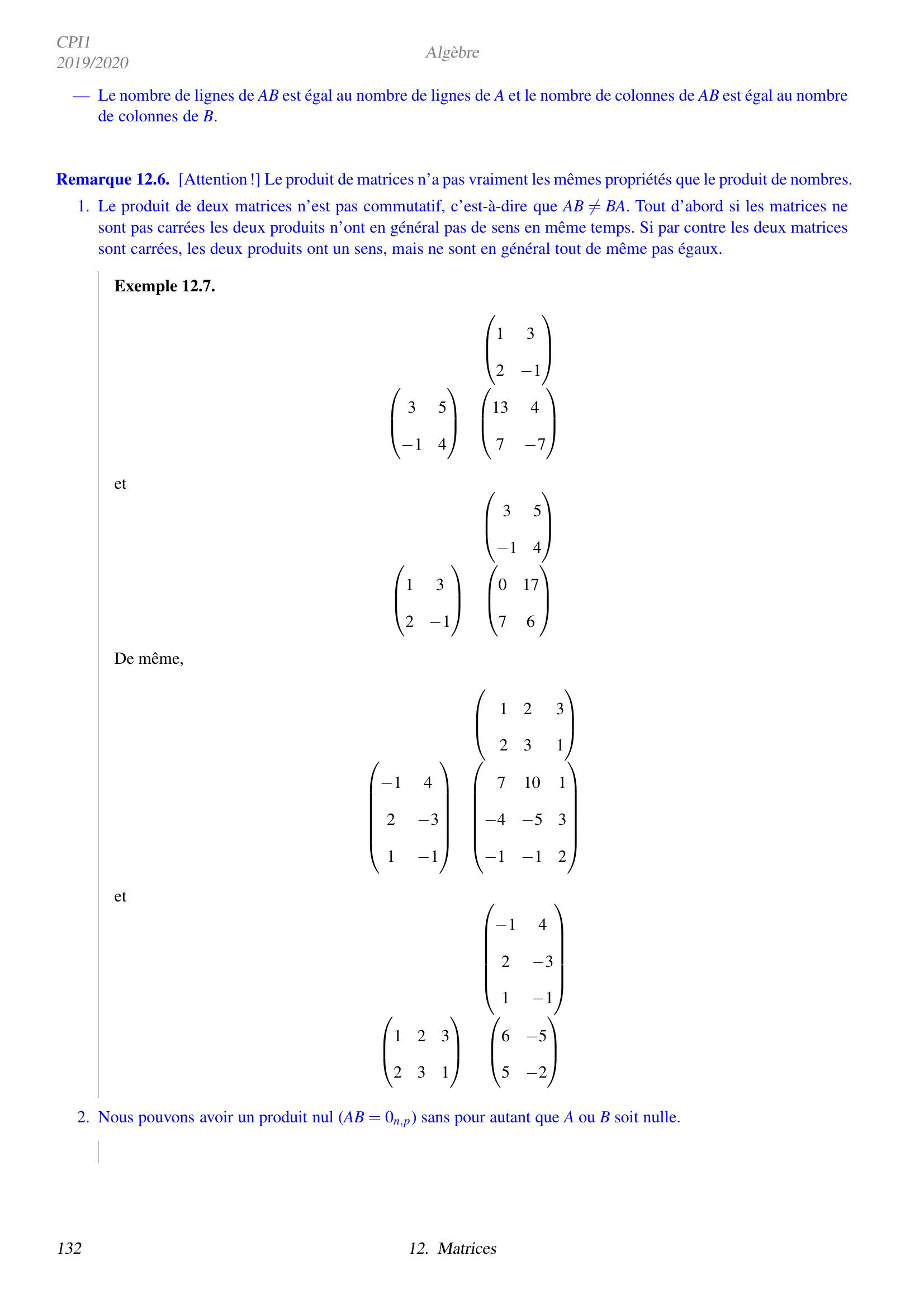
Page 139 : AlgèbreCPI12019/2020Exemple 12.8. Soit A =1100et B =1212. Alors121211000000Définition 12.12 Transposée. Soit A = ai,j 1in1jp une matrice de taille n × p. On appelle transposée de A lamatrice notée tA de taille p×n dont l’élément à la i-ième ligne et j-ième colonne est égal à l’élément à la j-ièmeligne et i-ième colonne de A.A =a1,1a1,2a1,3.........a1,p1a1,pa2,1a2,2a2,3.........a2,p1a2,pa3,1a3,2a3,3.........a3,p1a3,p........................an1,1an1,2an1,3.........an1,p1an1,pan,1an,2an,3.........an,p1an,ptA =a1,1a2,1a3,1...an1,1an,1a1,2a2,2a3,2...an1,2an,2a1,3a2,3a3,3...an1,3an,3......................................................a1,p1a2,p1a3,p1...an1,p1an,p1a1,pa2,pa3,p...an1,pan,pExemple 12.9. La transposée de A =123456est tA =14253612. Matrices133
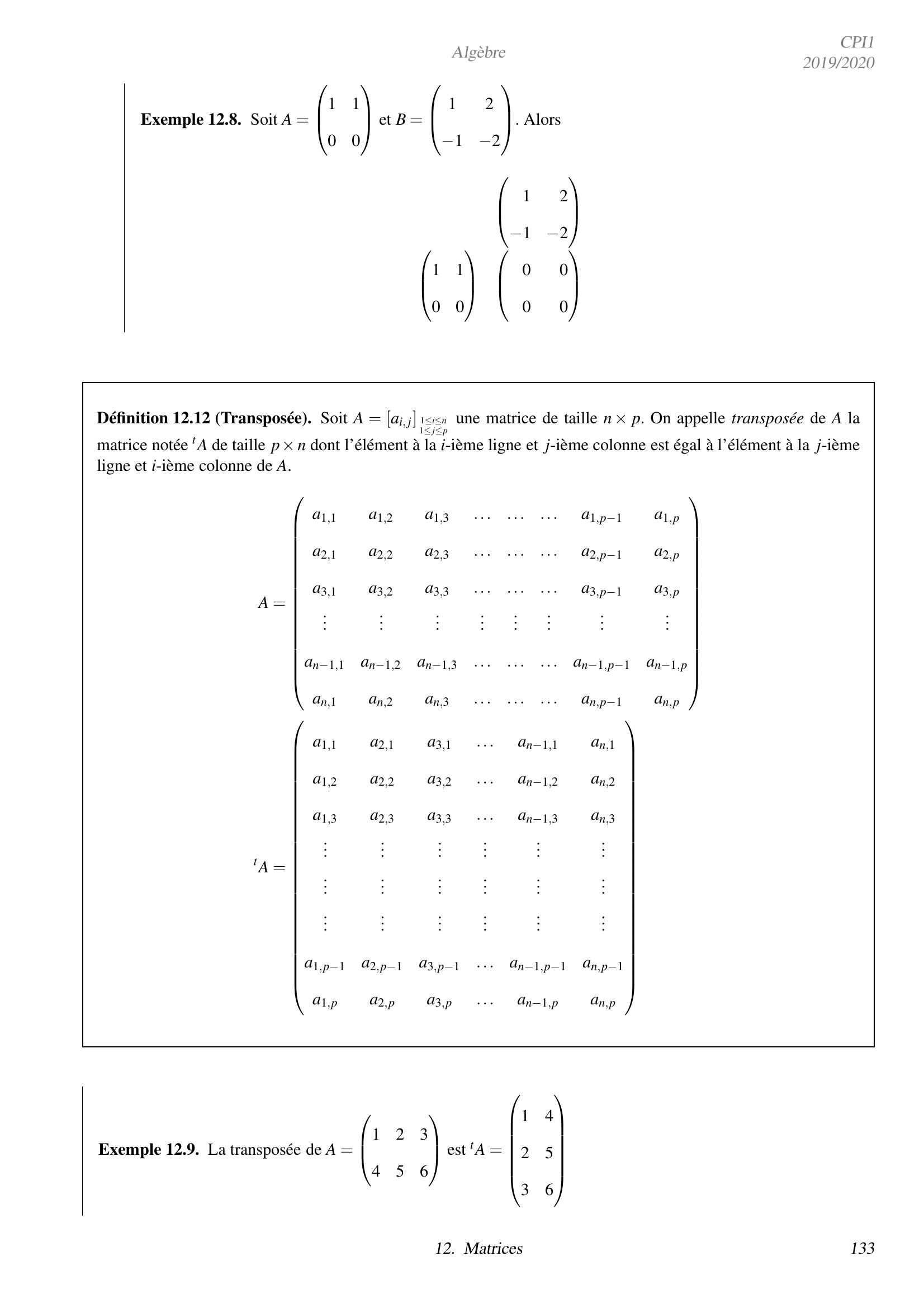
Page 140 : CPI12019/2020AlgèbreDéfinition 12.13 Matrices symétriques / anti-symétriques. Soit A une matrice carrée.On dit que A est symétrique si et seulement si elle est égale à sa transposée A = tA.On dit que A est anti-symétrique si et seulement si elle est égale à l’opposé de sa transposée A = tA.Remarque 12.7.— Une matrice A = ai,j est symétrique si et seulement si, pour tout i et pour tout j, ai,j = aj,i.— Une matrice A = ai,j est anti-symétrique si et seulement si, pour tout i et pour tout j, ai,j = aj,i. En particulier,puisque ai,i = ai,i, la diagonale d’une matrice anti-symétrique est forcément nulle.Exemple 12.10. La matrice A =12342567368947910est symétrique.La matrice B =012103230est anti-symétrique.Définition 12.14 Trace. Soit A une matrice carrée. On appelle trace de A, le nombre noté trA égal à la sommedes éléments diagonaux de A :trA = a1,1 +a2,2 +···+an,n =ni=1ai,i12.2. PropriétésPrenons deux matrices carrées A et B de même taille et calculons le produit A + BA + B. Nous obtenons A2 +AB + BA + B2. Si AB = BA alors nous retrouvons l’identité remarquable bien connue. Par contre si AB ̸= BA alorsl’identité remarquable est fausse. La propriété 12.1 suivante permet de généraliser cela.Propriété 12.1 Formule du binôme. Soit A et B deux matrices carrées telles que AB = BA on dit que A et Bcommutent alorsn N, A+Bn =nk=0nkAkBnkDémonstration. La démonstration est la même que pour la formule du binôme de Newton dans R. Il faut simplementmontrer d’abord que si A et B commutent alors An1Bn2 = Bn2An1.□13412. Matrices

Page 141 : AlgèbreCPI12019/2020Propriété 12.2. Soit A et B deux matrices et λ K. Alors1. ttA = A.2. tA+B = tA+ tB.3. tλA = λtA.4. Si le produit AB est défini, alors tAB = tBtADémonstration. Les trois premiers points sont évidents. Montrons le dernier.Puisque le produit AB est défini, le nombre de colonnes de A est égal au nombre de lignes de B, donc le nombre decolonnes de tB est égal au nombre de lignes de tA. Le produit tBtA a donc un sens.De plus, posons AB = C et tBtA = D. Supposons A Mn,pK et B Mp,mK. On a pour tout 1 i n et pour tout1 j m, ci,j =pk=1ai,kbk,j et dj,i =pk=1bk,jai,k = ci,j. On a donc bien D = tC.□Propriété 12.3. Soit A et B deux matrices carrées de même taille. Alors1. trA+B = trA+trB.2. trAB = trBA.3. Pour tout λ K, trλA = λtrA.Démonstration. Alors1. Les éléments diagonaux de A+B sont la somme des éléments diagonaux de A et de B.2. Soit C = AB et D = BA. On a pour tout i, ci,i =nk=1ai,kbk,i et pour tout k, dk,k =ni=1bk,iai,k. Ainsi, trBA =trD =nk=1dkk =nk=1ni=1bk,iai,k =nk=1ni=1ai,kbk,i =ni=1nk=1ai,kbk,i =ni=1ci,i = trC = trAB.3. Évident.Et voila.□12.3. Matrices inversiblesNous avons vu plus haut que nous pouvions écrire un système linéaire sous la forme AX = B où A est la matriceassociée au système linéaire, X le vecteur inconnu et B la matrice du second membre. Nous aimerions donc pouvoirécrire naturellement les solutions sous la forme X = A1B. Pour cela il nous faut d’abord définir ce que veux dire ce« A1 ».12.3.1. ThéoriePropriété 12.4. Soit A une matrice carrée de taille n, alors AIn = InA = A.Démonstration. Il suffit d’écrire le produit pour s’en rendre compte, mais faisons tout de même la démonstration.Notons B = In et C = AB. Par définition de la matrice identité, nous avons bi,j = 0 pour i ̸= j et bi,i = 1. Par définitiondu produit, nous avons ci,j =nk=1ai,kbk,j d’où ci,j = ai,j et C = A.□12. Matrices135
Page 142 : CPI12019/2020AlgèbreNous voyons que la matrice identité joue le rôle du « 1 » pour les nombres ou de la fonction identité pour lesfonctions. Nous pouvons encore pousser la comparaison plus loin en définissant l’inverse d’une matrice carrée.Définition 12.15 Inverse d’une matrice carrée. Soit A une matrice carrée de taille n. On appelle inverse de Aque l’on note A1 une matrice si elle existe telle que AA1 = A1A = In.Remarque 12.8. Puisque nous devons avoir AA1 = A1A, la définition n’a de sens que pour les matrices carrées.Propriété 12.5. Si une matrice est inversible alors elle admet un unique inverse.Démonstration. Le magma M;+ est associatif, donc voir la démonstration dans le chapitre strucure.□Exemple 12.11. Soit A =4172alors417221741001et217441721001Ainsi,2174est l’inverse de A et réciproquement.Propriété 12.6. Soit A et B deux matrices carrées de taille n telles que AB = In. Alors BA = In, et A et B sontinverses l’une de l’autre.Démonstration. Admis.□13612. Matrices
Page 143 : AlgèbreCPI12019/2020Propriété 12.7. Soit A une matrice carrée de taille n. Alors A est inversible si et seulement si tout système linéairede matrice associée A c’est-à-dire tout système de la forme AX = B possède une unique solution.Démonstration. Encore⇒Si A est inversible, alors de l’égalité AX = B, on peut déduire que A1AX = A1B, c’est-à-dire X = A1B. Ainsi,un tel système possède au moins une solution. Montrons l’unicité : supposons que nous avons deux solutions X1et X2. Nous avons donc AX1 = B et AX2 = B. En soustrayant ces deux égalités nous obtenons AX1 X2 = 0n,1.Puisque A est inversible, nous pouvons multiplier à gauche par A1 : A1AX1 X2 = A10n,1, c’est-à-direX1 X2 = 0n,1, d’où X1 = X2 et l’unicité de la solution.⇐Notons Bi la matrice colonne formée de la i-ième colonne de In. Puisque tout système de la forme AX = B admetune unique solution, nous pouvons noter Xi la solution de AX = Bi. Notons C la matrice carrée dont la i-ièmecolonne est Xi. Nous avons alors par construction AC = In. D’où A est inversible d’inverse C.Remarque 12.9. Ainsi, pour résoudre un système linéaire de la forme AX = B dont on connait déjà A1, il suffit decalculerX = A1BPropriété 12.8. Une matrice carrée de taille n est inversible si et seulement si elle est de rang n.Démonstration. Admis.□Corollaire 12.1. Un système linéaire à n équations et n inconnues possède une unique solution si et seulement si ilest de rang n.Démonstration. Cela découle des deux propriétés 12.8 et 12.7 précédentes.□Propriété 12.9. Soit A une matrice triangulaire supérieure resp. inférieure. Alors A est inversible si et seulementsi tous ses coefficients diagonaux sont non nuls c’est-à-dire si et seulement si le produit des coefficients diagonauxest non nul. Dans ce cas, A1 est aussi une matrice triangulaire supérieure resp. inférieure.Démonstration. Si la matrice est triangulaire, alors son rang est égal au nombre de coefficients non nuls de sadiagonale. L’équivalence découle donc de la propriété 12.8. Le fait que la matrice inverse soit triangulaire est admis.□Propriété 12.10. Soit A et B deux matrices de tailles n inversibles. Alors1. le produit AB est inversible et AB1 = B1A1.2. Am est inversible et Am1 =A1m.3. La transposée de A est inversible et tA1 = tA1.12. Matrices137
Page 144 : CPI12019/2020AlgèbreDémonstration. Voili1. B1A1AB = B1A1AB = B1InB = B1B = In.2.A1m Am =A1Am = Inm = In.3. tA1tA = tAA1= tIn = In.Définition 12.16. On appelle groupe linéaire d’ordre n l’ensemble des matrices carrées de tailles n inversibles età coefficients dans K. On note cet ensemble GLnK.Propriété 12.11. Pour tout n N, le groupe linéaire d’ordre n est un groupe pour la multiplication des matrices.Démonstration. Il est inclus dans l’ensemble des matrices qui est un groupe. Il contient la matrice identité l’élémentneutre et si deux matrices sont inversibles, alors leur produit aussi.□12.3.2. PratiqueVoyons maintenant concrètement comment calculer l’inverse d’une matrice.D’après la démonstration de la propriété 12.7, les colonnes de l’inverse d’une matrice sont déterminées en résolvantdes systèmes linéaires dont les seconds membres sont les colonnes de la matrice identité. Mis à part les secondsmembres, tous les systèmes à résoudre sont identiques, donc l’algorithme du pivot de Gauss nous mènera exactementaux mêmes calculs. Le principe de la méthode consiste à résoudre tous les systèmes en même temps.Propriété 12.12 Algorithme de Gauss-Jordan. Soit A une matrice carrée de taille n inversible. L’inverse A1 deA se calcule de la manière suivante :1. On forme la matrice augmentée n×2n suivante B = AIn.2. On applique l’algorithme de Gauss à B.3. Une fois le système échelonné obtenu, on continue sur le même principe que l’algorithme de Gauss afind’obtenir une matrice de la forme InC4. L’inverse est A1 = C.Démonstration. Admis.□Exemple 12.12. Inverser la matrice A =123234346.13812. Matrices

Page 145 : AlgèbreCPI12019/2020123100234010346001L2 ←L2 2L1, L3 ←L3 3L1123100012210023301L2 ←L2, L3 ←L3 +2L2123100012210001121L2 ←L2 2L3, L1 ←L1 3L3120263010032001121L1 ←L1 2L2100201010032001121L’inverse de A est doncA1 =20103212112. Matrices139
Page 146 :

Page 147 : 13. DéterminantsThere’s al–gebra. That’s like sums withletters. For... for people whose brainsaren’t clever enough for numbers, see?Sergeant Colon, JingoPrésentationNous avons déjà rencontré deux déterminants en première année : celui de deux vecteurs du plan R2 et celui detrois vecteurs de l’espace R3. Nous n’allons pas rappeler la définition géométrique qui avait été donnée, simplementrappeler deux propriétés :Propriété 13.1 déterminant de deux vecteurs de R2. Soit →ua11a21et →va12a22deux vecteurs de R2 munid’une base orthonormée directe. Le déterminant de →u et →v est donné par :det→u ,→v =a11a12a21a22= a11a22 a21a12Propriété 13.2 déterminant de trois vecteurs de R3. Soit →ua11a21a31, →va12a22a32et →wa13a23a33trois vecteurs deR3 muni d’une base orthonormée directe. Le déterminant de →u , →v et →w est donné par :det→u ,→v ,→w =a11a12a13a21a22a23a31a32a33= a11a22a23a32a33a21a12a13a32a33+a31a12a13a22a23Sur cette dernière propriété, vous voyez que l’on peut calculer le déterminant de trois vecteurs de R3 à partir decelui de deux vecteurs de R2. C’est en généralisant cette formule que nous allons définir le déterminant de n vecteursde Rn, en utilisant ce que l’on appelle une définition par récurrence.141
Page 148 : CPI12019/2020Algèbre13.1. Déterminant d’une matrice carré13.1.1. DéfinitionsDéfinition 13.1 Mineure d’une matrice.Soit A = aij une matrice carrée de taille n×n. Pour tout couple i, j J1;nK2, on appelle mineure d’indice i, jla matrice de taille n1×n1 obtenue en supprimant la ie ligne et la je colonne de A.Exemple 13.1. Soit A =12345678910111213141516. La mineure d’indice 2,3 est :A2,3 =12345678910111213141516=12491012131416Définition 13.2 Déterminant d’une matrice carrée.Soit A = aij une matrice carrée de taille n×n et pour tout i, j J1;nK2, Aij la matrice obtenue en supprimantla ie ligne et la je colonne de A. On appelle déterminant de A le nombre défini par :— Si n = 2, detA =a11a12a21a22= a11a22 a21a12— Si n 2, detA =ni=11i+1ai1 detAi1Remarque 13.1.— Notez bien le 11+i dans la somme.— Si A est une matrice 3×3, on peut utiliser la règle de Sarrus :xx′x′′yy′y′′zz′z′′xx′x′′yy′y′′14213. Déterminants

Page 149 : AlgèbreCPI12019/2020Exemple 13.2. Calculons le déterminant de la matrice de l’exemple 13.1. Nous avonsdetA =12345678910111213141516= 1×12345678910111213 1415165×12345678910111213 141516+9×12345678910111213 14151613×12345678910111213 141516=6781011121415165234101112141516+923467814151613234678101112Soit on continue à développer les déterminants, soit on utilise la règle de Sarrus qui revient en réalitéà faire un développement, mais à ne pas l’écrire :detA = 6×11×16+10×15×8+14×7×1214×11×8+15×12×6+16×10×752×11×16+10×15×4+14×3×1214×11×4+15×12×2+16×10×3+92×7×16+6×15×4+14×3×814×7×4+15×8×2+16×6×3132×7×12+6×11×4+10×3×810×7×4+11×8×2+12×6×3= 013.1.2. PropriétésPropriété 13.3. Soit A = aij une matrice de taille n×n. AlorsdettA= detADémonstration. C’est évident pour une matrices 2× 2, on peut le vérifier aisément pour une matrice 3× 3 avec larègle de Sarrus. Pour les matrices plus grosse, la démonstration est hors programme.□Remarque 13.2. Cette propriété 13.3 permet d’affirmer que toute les propriétés sur les lignes sont valables sur lescolonnes et inversement. Dans la suite nous énoncerons les propriétés à la fois sur les lignes et sur les colonnes, maisles démonstrations ne seront faites que sur les colonnes.Propriété 13.4. Soit A = aij une matrice de taille n× n, j J1;nK et B j la matrice obtenue en intervertissant lapremière et la je colonne ou ligne de A. AlorsdetB j = detA13. Déterminants143
Page 150 : CPI12019/2020AlgèbreDémonstration. Là encore c’est évident pour les matrices 2 × 2 et 3 × 3. On l’admet pour les matrices de taillessupérieures.□Propriété 13.5. Échanger deux colonnes ou deux lignes de A a pour effet de multiplier le déterminant par 1.Démonstration. Supposons que l’on échange les colonnes i et j, avec i ̸= j. Si i = 1 ou j = 1, on est dans le cadre dela propriété précédente. Supposons donc que i ̸= 1 et j ̸= 1. Alors l’inversion de la colonne i et de la colonne j revientà échanger la colonne i et la première colonne donc multiplication par -1, puis échanger la colonne j et la premièrecolonne donc la colonne j passe en première position et la colonne i passe en je position, et multiplication par -1,et enfin à échanger la colonne i qui était la première et la première colonne qui était la je donc multiplication par-1. Au final nous avons fait trois multiplications par -1, donc le déterminant est bien multiplié par -1.□Propriété 13.6. Le déterminant d’une matrice ayant deux colonnes ou deux lignes égales est nul.Démonstration. Supposons que les colonnes i et j soient identiques. Alors en intervertissant ces deux colonnes, onmultiplie le déterminant par -1. Or la matrice reste la même, donc le déterminant ne change pas. On en déduit quele déterminant est égal à son opposé, il est donc nul.□Propriété 13.7. Soit λ un réel. Multiplier une colonne ou une ligne d’une matrice par λ, multiplie son déterminantpar λ.Démonstration. C’est évident pour la première colonne en revenant à la définition récursive du déterminant. Lespropriétés précédentes permettent alors de conclure.□Propriété 13.8. Soit A une matrice de taille n×n et λ R. AlorsdetλA = λn detADémonstration. C’est évident si on remarque que toutes les colonnes ou toutes les lignes de A sont multipliées parλ.□Propriété 13.9. Ajouter à une colonne ou une ligne une combinaison linéaire des autres colonnes ou ligne nemodifie par le déterminant.14413. Déterminants
Page 151 : AlgèbreCPI12019/2020Démonstration. Admis.□Corollaire 13.1. Le déterminant d’une matrice ayant une colonne ou une ligne nulle est nul.Démonstration. En ajoutant à la colonne nulle n’importe qu’elle autre colonne, on ne change pas le déterminant. Oron obtient une matrice ayant deux colonnes identiques. Le déterminant est donc nul.□Propriété 13.10. Une matrice carrée est inversible si et seulement si son déterminant est non nul.Démonstration. Admis. Nous avons déjà vu ce résultat lorsque nous avons inversé la matrice 2 × 2abcdenexercice.□Propriété 13.11. Le déterminant du produit de deux matrices est égal au produit des déterminants : Pour A et B detaille n×n,detAB = detA×detBDémonstration. Hors programme.□13.1.3. Calculs pratiques de déterminantToutes les propriétés de la section précédente vont nous permettre d’écrire d’autres propriétés qui vont faciliter lescalculs de déterminants.Tout d’abord remarquons que le calcul d’un déterminant n×n à partir de la définition, revient à calculer n détermi-nants de tailles n1×n1. Si la première colonne a beaucoup de zéros voire un seul coefficient non nul alorscela fait moins de déterminants à calculer.Les propriétés 13.9 et 13.7 vont nous permettre d’appliquer l’algorithme de Gauss sur la matrice pour tenter de mettrele plus de zéros possible en première colonne. Cependant, l’algorithme de Gauss étant lui aussi couteux en calculs, ilfaut réussir à faire un compromis et on ne le mène pas forcément jusqu’au bout.Propriété 13.12 Développement selon une ligne et une colonne. Soit A = aij une matrice de taille n × n eti, j J1;nK2. AlorsdetA =nk=11k+ jak j detAk jdéveloppement selon la colonne jdetA =nk=11i+kaik detAikdéveloppement selon la ligne i13. Déterminants145
Page 152 : CPI12019/2020AlgèbreDémonstration. En intervertissant la colonne j avec la colonne j 1, puis la colonne j 1 avec la colonne j2, etc, jusqu’à la colonne 2 et la colonne 1, on a déplacé la je colonne en première position et décalé les colonnes1 à j 1 d’un cran vers la droite. On a de plus fait j 1 inversions de colonnes, donc multiplié le déterminantpar 1j1. Maintenant que la colonne j est en première position, on peut appliquer la définition du déterminant etretrouver la formule annoncée11+i ×1j1 = 1i+ j.□Cette propriété nous permet de choisir la ligne ou la colonne ayant le plus de zéros possibles pour calculer plusefficacement le déterminant. Attention cependant de ne pas oublier le 1i+ j !Exemple 13.3. Soit A =120456789100121415218. Calculons ce déterminant. On remarque d’abord que sur la 3ecolonne il y a la moitié des coefficients qui sont nuls. Nous allons donc développer selon la troisième colonne :detA = 13+2 ×712491012141518+13+4 ×212456891012= 7180+15×9×4+33656015×1218×18212×6+200+1449×2480120= 7×82×0= 56Propriété 13.13 Matrice triangulaire. Le déterminant d’une matrice triangulaire est égal au produit des coeffi-cients de la diagonale.Démonstration. Supposons qu’elle soit triangulaire supérieure. On développe selon la première colonne qui ne pos-sède que des zéros sauf sur la première ligne. Donc le déterminant est égal à a11 multiplié par le déterminant de lamatrice obtenue en supprimant la première ligne et la première colonne. On retombe sur une matrice triangulairesupérieure. Par récurrence on montre donc le résultat.□Corollaire 13.2 Matrice diagonale. Le déterminant d’une matrice diagonale est égal au produit des coefficientsde la diagonale.Démonstration. Une matrice diagonale est une matrice triangulaire bien particulière.□Corollaire 13.3 Matrice identité. Le déterminant de la matrice identité est égal à 1.Démonstration. Vraiment??□14613. Déterminants

Page 153 : AlgèbreCPI12019/2020Propriété 13.14 Matrice inverse. Le déterminant de l’inverse d’une matrice inversible est égal à l’inverse dudéterminant :detA1=1detADémonstration. Tout d’abord remarquons que la formule a du sens puisqu’une matrice est inversible si et seulementsi son déterminant est non nul propriété 13.10. Soit A une matrice inversible. On a AA1 = In d’où 1 = detIn =detAA1 = detAdetA1. D’où le résultat.□Propriété 13.15 Matrice triangulaire par bloc. Soit n N, B une matrice de taille p × p avec p n, C unematrice de taille p×np, D une matrice de taille np×np et A la matrice définie parA =BC0DAlors :detA = detB×detDDémonstration. Admis.□Remarque 13.3. La propriété a été énoncée pour deux blocs diagonaux, mais vous pouvez montrer facilement parrécurrence que l’on peut la généraliser à plusieurs blocs diagonaux.Exemple 13.4. Soit A =1234567891000abc00def0000g. Alors detA = 1×76×2×aebd×g = 5gaebd.13. Déterminants147
Page 154 : CPI12019/2020Algèbre13.2. Déterminant d’une famille de vecteursNous avons introduit ce chapitre avec le déterminants de vecteurs de R2 et R3 pour justifier la définition du déter-minant d’une matrice. Mais qu’en est-il de la définition du déterminant de n vecteurs de Rn ?Définition 13.3 Déterminant de n vecteurs.Soit B = e1,...,en une base de Rn. Soit u1a11a21...an1, u2a12a22...an2, . . ., una1na2n...ann, n vecteurs de Rn dont les co-ordonnées sont données dans la base B. Soit A = aij la matrice n× n construites à partir des vecteurs ui. Ondéfinit le déterminant de la famille u1,...,un dans la base B pardet B u1,...,un = detARemarque 13.4.Puisque les coordonnées d’un vecteur changent suivant la base choisie, le déterminant d’une famille de vecteurschange selon la base dans lequel on le calcul. Il existe une formule de « changement de bases » qui n’est pas au pro-gramme qui permet de calculer le déterminant d’une famille de vecteurs dans une base B′ connaissant son déterminantdans la base B : det B′ u1,...,un = det B u1,...,un×det B′ B.On pourrait montrer que le déterminant d’une base orthonormée dans une autre base orthonormée vaut soit 1 soit-1. Cela permet de classer les bases orthonormées en deux catégories : les bases directes qui ont un déterminantégal à 1 dans la base canonique et les bases indirectes. Je vous invite à faire le parallèle avec ce qui a été vue dans lechapitre « Géométrie de l’espace » de première année.Tout cela permet de voir que le déterminant d’une famille de vecteurs ne change pas lorsque l’on passe d’une baseorthonormée à une autre de même direction, et qu’il est multiplié par -1 si on change l’orientation de la base.Remarque 13.5. Toutes les propriétés des sections précédentes peuvent être retranscrites en termes de vecteurs. Parexemple, la propriété 13.5 se réécrit : Échanger deux vecteurs de la famille a pour effet de multiplier le déterminantpar -1.Propriété 13.16 Caractérisation d’une famille liée. Soit u1,...,un une famille de n vecteurs de Rn. Il y aéquivalence entre les assertions suivantes :1. La famille u1,...,un est liée.2. Pour toutes bases B de Rn, on a det B u1,...,un = 03. Il existe une base B de Rn telle que det B u1,...,un = 0Démonstration.1⇒2Si la famille est liée alors il existe une combinaison linéaire, à coefficients non tous nuls, nulle. Donc l’un desvecteurs peut s’écrire comme combinaison linéaire des autres. En soustrayant à ce vecteur cette combinaisonlinéaire des autres, on ne change pas le déterminant et on transforme la colonne correspondante en une colonnenulle. Le déterminant, quelque soit la base, est nul.14813. Déterminants

Page 155 : AlgèbreCPI12019/20202⇒3Si la propriété est vraie pour toute les bases alors elle est vraie pour l’une d’elle. . .3⇒1Admis.Propriété 13.17 Caractérisation d’une base. Soit u1,...,un une famille de n vecteurs de Rn. Il y a équivalenceentre les assertions suivantes :1. La famille u1,...,un est une base.2. Pour toutes bases B de Rn, on a det B u1,...,un ̸= 03. Il existe une base B de Rn telle que det B u1,...,un ̸= 0Démonstration. Un déterminant est soit nul, soit non nul. Une famille libre de n vecteurs de Rn est une base, doncune famille de n vecteurs est soit une base soit liée. Donc cette propriété est simplement une réécriture de la pro-priété 13.16.□13.3. Applications13.3.1. Géométrie— Nous avons déjà vu l’année dernière que le déterminant de deux vecteurs du plan est égal à la surface algébriquedu parallélogramme construit à partir de ces deux vecteurs.— Nous avons déjà vu l’année dernière que le déterminant de trois vecteurs de l’espace est égal au volume algé-brique du parallélépipède construit à partir de ces trois vecteurs.13.3.2. Résolution de systèmes linéairesPropriété 13.18 Formules de Cramer. Soit A une matrice de taille n × n de déterminant non nul. Soit B unematrice colonne de taille n×1. Alors le système linéaire AX = B possède une unique solution dont les composantessont données par :i J1;nK, xi = detC1,...,Ci1,B,Ci+1,...,CndetAoù C1,...,Cn sont les colonnes de A.Démonstration. Puisque B = x1C1 +···+xnCn, on a detC1,...,Ci1,B,Ci+1,...,Cn = xi detA.□Remarque 13.6. Résoudre un système avec cette formule demande de calculer n+1 déterminants, chaque calcul dedéterminant pouvant se faire par pivot de Gauss. Donc suivant la taille du système à résoudre, ce n’est pas forcémentune méthode très efficace.Exemple 13.5. Résoudre2xy+z=0x2yz=33x+y+2z=113. Déterminants149

Page 156 : CPI12019/2020AlgèbreOn a detA =211121312= 6. D’oùx =0113211126= 126 = 2;y =2011313126= 66 = 1;z =2101233116= 186= 315013. Déterminants
Page 157 : 14. Représentation matricielle des applications linéairesDans tout ce chapitre, K désigne l’un des corps R ou C. Les lettres n, p et q sont des entiers naturels non nuls.14.1. Matrice d’une application linéaire14.1.1. Matrice d’une famille finie de vecteurs dans une base finieDéfinition 14.1 Matrice d’une famille finie de vecteurs dans une base finie. Soit E un K-espace vectoriel dedimension finie n, B = e1,...,en une base de E et X = X1,...,Xp une famille finie de vecteurs de E.Pour tout j J1; pK on note a1j,...,anj les coordonnées de Xj dans la base B. La matrice aij1in1jp, notéeMatBX , est appelée matrice de X dans la base B.MatBX =X1XjXp↓↓↓a11...a1j...a1p←e1.........ai1...aij...aip←ei.........an1...anj...anp←enCoordonnées de Xj dans B écrites en colonnesThéorème 14.1 Bases et matrices inversibles. Soit E un K-espace vectoriel de dimension finie n, B une basede E et F une famille de n vecteurs de E. Alors F est une base de E si et seulement si MatBF est inversible.Démonstration. Il suffit d’utiliser la caractérisation d’une base propriété 13.16 et le fait qu’une matrice est inver-sible si et seulement si son déterminant est non nul propriété 13.10□Propriété 14.1. Soit E ̸= 0E un K-espace vectoriel de dimension finie, B une base de E et X une famille devecteurs de E. AlorsrgX = rgMatBX Démonstration. Admis.□151
Page 158 : CPI12019/2020Algèbre14.1.2. Matrice d’une application linéaire dans des basesDéfinition 14.2 Matrice d’une application linéaire dans des bases finies. Soit E et F deux K-espace vec-toriels de dimensions respectives p et n, B = e1,...,ep une base de E, C = f1,..., fn une base de Fet f L E ;F. On appelle matrice de f dans B et C et on note MatB,C f la matrice de la famillefB = fe1,..., fep dans la base C .Si E = F et B = C , la matrice MatB,B f est simplement notée MatB f.MatB,C f = MatC fB =fe1fejfep↓↓↓a11...a1j...a1p←f1.........ai1...aij...aip←fi.........an1...anj...anp←fnCoordonnées de fej dans C écrites en colonnesRemarque 14.1. Nous savons que l’on connaît tout d’une application linéaire lorsque l’on connaît l’image d’unebase. Ainsi une application linéaire est entièrement déterminée par sa matrice associée dans deux bases données.Exemple 14.1.— Si E est un K-espace vectoriel de dimension finie n et si B est une base de E, alors MatBIdE = In.— Soit T l’endomorphisme P 7→X2P′′ +P1 de R3X et B3 la base canonique de R3X. AlorsMatB3T =1111000000200006Définition 14.3 Application linéaire canoniquement associée à une matrice. Soit A Mn,pK, Bp et Bnles bases canoniques respectives de Kp et Kn. On appelle application linéaire canoniquement associée à A l’ap-plication linéaire f telle queMatBp,Bn f = ARemarque 14.2. Ainsi, donner une matrice revient à donner une application linéaire.15214. Représentation matricielle des applications linéaires
Page 159 : AlgèbreCPI12019/2020Propriété 14.2 Rang d’une application linéaire. Soit E et F deux K-espaces vectoriels de dimension finie, Bune base de E, C une base de F et f L E ;F. Alorsrg f = rgMatB,C fDémonstration.rgMatB,C f = rgMatC f B = rg f B = dimVect fB = dimIm f = rg fD’où le résultat.□Théorème 14.2 Calcul matriciel de l’image d’un vecteur par une application linéaire. Soit E ̸= 0E et F ̸=0F deux K-espace vectoriels de dimension finie, B une base de E, C une base de F, u L E ;F et x E. AlorsMatC ux = MatB,C u×MatBxDémonstration. Soit B = e1,...,ep, C = f1,..., fn. Posons X = MatBx et U = MatB,C u.ux = u pj=1xjej!=pj=1xjuej =pj=1xjni=1uij fi =ni=1 pj=1uijxj!fiDonc les coordonnées de ux dans C sont pj=1u1jxj ;... ;pj=1unjxj!, c’est-à-dire le produit U ×X.□Remarque 14.3. Le calcul de l’image d’un vecteur par une application linéaire se réduit donc à un simple produitmatriciel. Attention cependant à ce que les matrices et les vecteurs soient écris dans les bonnes bases.Exemple 14.2. Soit f l’endomorphisme de R2X de matrice336012024dans la base canonique. DéterminerIm f et Ker f.Par définitionIm f = Vectf1; fX; fX2= Vect3;2X2 +X +3;4X2 +2X +6= Vect3;2X2 +X +3= Vect3;2X2 +XPuis, soit P = aX2 +bX +c R2X.P Ker f ⇔fP = 0 ⇔336012024cba=00014. Représentation matricielle des applications linéaires153

Page 160 : CPI12019/2020Algèbre⇔3c+3b+6a=0b+2a=02b+4a=0⇔c=0b+2a=0⇔P = aX2 2aX = aX2 2XDonc Ker f = VectX2 2X.14.1.3. Liens entre applications linéaires et matricesPropriété 14.3 Lien entre L E ;F et Mn,pK. Soit E et F deux K-espaces vectoriels de dimensions finiesrespectives p et n, B une base de E et C une base de F. L’application f 7→MatB,C f est un isomorphisme deL E ;F sur Mn,pK.Démonstration. Très bon exercice.□Remarque 14.4. Lorsque l’on parle d’isomorphisme il faut préciser de quelles lois on parle. Il est clair ici que l’onparle d’isomorphisme d’espaces vectoriels munis des lois classiques. Nous déduisons trois choses de cette propriété :— Comme nous l’avons mentionné plus haut, connaître une application linéaire est équivalent à connaître sa ma-trice dans deux bases.— MatB,C λ f +g = λMatB,C f+MatB,C g.— dimMn,p = np = dimE×dimF = dimL E ;FPropriété 14.4 Matrice d’une composée. Soit E, F, G trois K-espaces vectoriels de dimensions finies non nullesde bases respectives B, C , D et f L E ;F et g L F ;G. Alors,MatB,Dg◦f = MatC ,Dg×MatB,C fDémonstration. Notons B = e1,...,en. Alors pour tout j J1;nK, en utilisant le théorème de calcul matriciel del’image d’un vecteur théorème 14.2 :MatB,Dg◦f×MatBej = MatDg◦fej = MatC ,Dg×MatC fej = MatC ,Dg×MatB,C f×MatBejOr MatBej est le je vecteur de la base canonique de Kn, c’est-à-dire le vecteur ayant des 0 partout sauf un 1 enje position. Nous venons donc de montrer que pour tout j J1;nK, MatB,Dg◦f et MatC ,Dg×MatB,C f ont lamême je colonne. D’où l’égalité des matrices.□Remarque 14.5. En conclusion, la matrice de la composée de deux applications linéaires est tout simplement leproduit des matrices associées attention cependant d’être dans les bonnes bases!15414. Représentation matricielle des applications linéaires

Page 161 : AlgèbreCPI12019/2020Propriété 14.5 Matrice d’un isomorphisme. Soit E et F deux K-espaces vectoriels de mêmes dimensions finiesnon nulles de bases respectives B, C et f L E ;F. Alors f est un isomorphisme de E sur F si et seulement siMatB,C f est inversible. Dans ce cas,MatC ,Bf 1= MatB,C f1Démonstration. Si f est bijective et si on pose n = dimF, on a MatB,C f × MatC ,B f 1 = MatC IdF = In.Donc MatB,C f est inversible d’inverse MatC ,B f 1Réciproquement, si A = MatB,C f est inversible, notons g l’unique application linéaire de F dans E pour laquelleMatC ,Bg = A1. Dans ces conditions, MatBg◦f = MatC ,Bg×MatBC f = A1A = In. De même, MatC ,B =In. Donc g◦f = IdE et f ◦g = IdF et f est bijective de E sur F.□14.2. Changements de bases, équivalence et similitude14.2.1. Matrices de passage14.2.1.1. DéfinitionDéfinition 14.4 Matrice de passage. SoitEunK-espacevectorieldedimensionn.OnnoteB = e1,e2,...,en et B′ = e′1,e′2,...,e′n deux bases de E. On appelle matrice de passage de la base Bà la base B′ la matrice de l’application IdE relativement aux bases B′ et B.On la note :PBB′= MatBB′ = MatB′,BIdE =p1,1p1,2...p1,n←→e1p2,1p2,2...p2,n←→e2...............pn,1pn,2...pn,n←→en↑↑↑→e′1→e′2...→e′nCette matrice donne la décomposition des vecteurs de la base B′ dans la base B.Remarque 14.6.— Attention à l’ordre des bases B et B′ !— On remarque que PBB′ = MatBB′. Donc si les coordonnées des vecteurs de B′ sont données dans la baseB lorsque B est la base canonique par exemple, alors la matrice de passage de B à B′ est simplement donnéeen recopiant les coordonnées des vecteurs de B′.Exemple 14.3. Soit E = R2X, B =1,X,X2et B′ =1,X 1,X 12. On a alors 1 = 1, donc IdE1 =1+0X +0X2. X 1 = 1+X, donc IdEX 1 = 1+1X +0X2. Enfin, X 12 = 12X +X2, d’où IdEX 14. Représentation matricielle des applications linéaires155

Page 162 : CPI12019/2020Algèbre12 = 12X +1X2. La matrice de passage de B à B′ est donc :PBB′=111←1012←X001←X2↑↑↑1X 1X 12Remarque 14.7. Astuce Si les coordonnées des vecteurs des bases B et B′ sont données dans une même basecanonique par exemple, nous pouvons calculer PBB′ de manière astucieuse.Pour déterminer la première colonne de P, nous cherchons les coordonnées du vecteur e′1 dans la base B, c’est-à-dire que nous cherchons des coefficients x11,...,x1n tels que e′1 = x11e1 +···+x1nen. Pour cela on résout un systèmelinéaire dont la matrice associée est tout simplement la matrice B dont les colonnes sont les coordonnées des vecteursde B dans la base canonique. Ce qui veut dire que l’on cherche X1 tel que BX1 = e′1. On recommence le procédépour X2 jusqu’à Xn. On remarque alors qu’au lieu de résoudre n systèmes linéaires parfaitement identiques, sauf en cequi concerne le second membre, il vaut mieux tout résoudre d’un coup : On crée la matrice B′ dont les colonnes sontles coordonnées des vecteurs de B′ dans la base canonique et la matrice X dont les colonnes sont les Xi. Ainsi, nousavons l’équation matricielle BX = B′ dont la solution estX = B1B′Par définition de X et de PBB′, nous avons X = PBB′ = B1B′.14.2.1.2. PropriétésPropriété 14.6. Soit E un K-espace vectoriel de dimension finie, et B et B′ deux bases de E. Si P = PB B′,alors P est inversible et P1 = PB′ BDémonstration. C’est tout simplement une application de la propriété 14.5.□Propriété 14.7. Soit E un espace vectoriel de dimension finie et P MnK. Alors P est inversible si et seulementsi il existe deux bases B et B′ de E telles que P = PBB′ = MatB′,BIdE.Démonstration.⇐C’est la propriété 14.6.⇒Soit ei la base canonique de E. Soit, pour tout j J1;nK, f j le j-ième vecteur colonne de P : f j =ni=1pijei.Alors B′ = f j est une base de E car detB′ = detP ̸= 0.15614. Représentation matricielle des applications linéaires

Page 163 : AlgèbreCPI12019/2020Ainsi, pour tout j J1;nK, Id f j = f j =ni=1pijei =p1j...pnjBc. D’où MatB′,BcIdE = P.Remarque 14.8. Cette propriété nous dit que toute matrice inversible est une matrice de passage.Propriété 14.8. Soit E un K-espace vectoriel de dimension finie, et B, B′ et B′′ trois bases de E. Alors PB B′′ =PB B′×PB′ B′′.Démonstration. C’est tout simplement une application de la propriété 14.4.□Propriété 14.9 Matrice de passage et coordonnées. Soit E un K-espace vectoriel de dimension finie n, →x E,B et B′ deux bases de E, et P = PB B′. On note XB la matrice colonne des coordonnées de →x dans la base B etX′B′ la matrice colonne des coordonnées de →x dans la base B′. Alors :XB = PX′B′Démonstration. →x = IdE→x , donc le résultat découle simplement de la définition de la matrice de passage.□Exemple 14.4. Soit X =123dans la base canonique Bc, B′ = e1 ;e1 +e2 ;e3 e2 3e1. Déterminer lescoordonnées de X dans la base B′.Sans utiliser la formule : On écrit e1, e2, e3 en fonction des vecteurs ε1, ε2, ε3 de B′ :ε1= e1ε2= e1 +e2ε3= e3 e2 3e1⇔e1= ε1e2= ε2 ε1e3= ε3 +ε2 +2ε1Ainsi, de X = e1 +2e2 +3e3, nous arrivons à X = 5ε1 +5ε2 +3ε3En utilisant la formule de changement de bases : Nous avons XBc = PXB′, d’où XB′ = P1XBc. Il faut donccalculer l’inverse de P =113011001=112011001. Et on retrouve XB′ =553.14. Représentation matricielle des applications linéaires157

Page 164 : CPI12019/2020AlgèbreRemarque 14.9. Attention à l’ordre des bases et des vecteurs. Il serait plus naturel d’écrire X′ = PX, ce qui est uneerreur. P est la matrice de passage de B à B′ et pourtant on calcule les coordonnées de →x dans la base B à partir decelles de →x dans la base B′.14.2.2. Matrices équivalentesDéfinition 14.5 Matrices équivalentes. Soit n; p N2 et deux matrices A, B appartenant à Mn,p K. Ondit que B est équivalente à A s’il existe deux matrices carrées inversibles Q GLn K, P GLp K telles que :B = Q1APPropriété 14.10. La relation « est équivalente à » sur Mn,pK est une relation d’équivalence. On dit alors simple-ment « A et B sont équivalentes » plutôt que « B est équivalente à A ».Démonstration. Réflexivité : Nous avons simplement A = I1n AIp.Symétrie : Nous avons B = Q1AP, donc A = QBP1. En posant Q′ = Q1 et P′ = P1, on a bien A = Q′1BP′.Transitivité : Nous avons C = Q1BP et B = Q′1AP′. En injectant dans l’expression de C, on obtientC = Q1 Q′1AP′P = Q1Q′1AP′P = Q′Q1 AP′P. En posant Q′′ = Q′Q et P′′ = P′P nous obtenonsC = Q′′1AP′′.Propriété 14.11 Matrices de passage et matrices équivalentes. Soit E et F deux espaces vectoriels de dimen-sions finies, f une application linéaire de E dans F, B1 et B′1 deux bases de E, et B2 et B′2 deux bases de F. Onnote :P = PB1B′1etQ = QB2B′2Soit A la matrice de f relativement aux bases B1 et B2, et B la matrice de f relativement aux bases B′1 et B′2. Ona alors :B = Q1APDémonstration. Soit →x un vecteur de E. Notons X et X′ les matrices colonnes des coordonnées de →x dans les basesB1 et B′1. Notons aussi Y et Y ′ les matrices colonnes des coordonnées de f →x dans les bases B2 et B′2.D’après la propriété 14.9, on a :X = PX′etY = QY ′Ou encore, puisque P est inversible, X′ = P1X.De plus, par définition de A et B, on aY = AXetY ′ = BX′Ainsi, AX = Y = QY ′ = QBX′ = QBP1X. Puisque cette égalité est vraie pour tout →x , on peut identifier :A = QBP1, ou encore B = Q1AP.□Remarque 14.10.15814. Représentation matricielle des applications linéaires

Page 165 : AlgèbreCPI12019/2020— Cette propriété nous dit que les matrices d’une même application dans des bases différentes sont des matriceséquivalentes.— Pour ne pas se perdre, il est recommandé de faire ce que l’on appel un diagramme commutatif :E,B′1IdE,P /f,BE,B1f,AF,B′2 IdF,Q/ F,B2On voit alors que fB = Id1F ◦fA ◦IdE, d’où l’égalité sur les matrices.Propriété 14.12. Soit A,B Mn,pK. Alors A et B sont équivalentes si et seulement si A et B sont les deux matricesd’une même applications linéaires dans deux bases différentes.Démonstration.⇐C’est la propriété 14.11.⇒Les matrices A et B étant équivalentes, il existe P et Q inversibles telles que B = Q1Ap. D’après la propriété 14.6,P et Q sont des matrices de passage de B1 à B′1 dans E espace de dimension n et de B2 à B′2 dans F espacede dimension p.Soit f l’application telle que MatB1,B2 f = A et g celle telle que MatB′1,B′2g = B. Soit x E, comme pour lapropriété 14.11, on pose X les coordonnées de x dans B1 et X′ celles dans B′1. D’où X = PX′. Soit y = gx etposons Y et Y ′ les coordonnées de y dans les bases B2 et B′2. On a alors Y ′ = BX′ = Q1APX′ = Q1AX. D’oùgx = Y = QY ′ = AX = fx. Ainsi f = g.Théorème 14.3 Matrice Jr. Soit E et F deux K-espaces vectoriels de dimensions respectives p et n, et f L E ;F de rang r. Alors il existe une base B de E et une base C de F telles queMatB,C f = Jr =Ir000Où Jr est une matrice de taille n× p.Démonstration. Supposons que B = ej1jp et C = fi1in soient deux bases qui conviennent et notons M =MatB,C f. Alors— Pour que les pr dernières colonnes de M soient nulles, il faut et il suffit que les vecteurs er+1,...,ep soientéléments de Ker f et linéairement indépendants. Comme Ker f est de dimension pr, d’après le théorème durang, nous n’avons qu’à choisir pour famille ejr+1jp une base de Ker f et la compléter simplement en unebase B de E.— Pour que les r première colonnes de M soient ce que l’on veut, on peut poser : f j = fej pour tout j J1;rK,puis compléter en une base C de F. Or ceci n’est possible qu’à condition que la famille fi1jr soit libre. Or lafamille ei1jr engendre par construction un supplémentaire I de Ker f dans E, donc fI est un isomorphismede I sur Im f noyau réduit au vecteur nul donc injective. Donc la famille fi1jr = fej1jr est libre.Nous avons donc bien réussi à construire deux bases B et C telles que M = Jr.□14. Représentation matricielle des applications linéaires159
Page 166 : CPI12019/2020AlgèbrePropriété 14.13 Invariance du rang. Soit A et B deux matrices de Mn,p K. Les matrices A et B sont équiva-lentes si et seulement si rgA = rgB.Cela implique que toute matrice de Mn,pK de rang r est équivalente à Jr.Démonstration. Soit A Mn,pK de rang r. Notons f l’application linéaire canoniquement associée à A et Bn etBp les bases canoniques respectives de Kn et Kp. D’après le théorème 14.3, il existe deux bases B de Kp et C deKn telles que MatB,C f = Jr. Ainsi, en posant P = PBpB et Q = PBnC , alors Jr = Q1AP. Ainsi A et Jr sontéquivalentes.On a ainsi montré que toute matrice de Mn,pK de rang r est équivalente à Jr, on en déduit, par transitivité, que deuxmatrices de Mn,pK ayant le même rang sont équivalentes.Réciproquement, nous avons vu propriété 14.12 que deux matrices équivalentes étaient les matrices d’une mêmeapplication linéaire dans des bases différentes. Le rang d’une application linéaire étant indépendant des bases danslesquelles ont travaille, on en déduit, grâce à la propriété 14.2 que les deux matrices ont le même rang.□Remarque 14.11. C’est surtout le sens indirect qui va nous servir : pour montrer que deux matrices sont équivalentes,il suffit de montrer qu’elles ont le même rang donc pas besoin de chercher les bases et les matrices de passagecorrespondantes.Remarque 14.12. Deux matrices carrées équivalentes ont le même rang, cependant elles n’ont pas forcément lemême déterminant et la même trace. Nous allons maintenant voir une notion plus forte que l’équivalence qui conservele déterminant et la trace.14.2.3. Matrices semblablesDans cette section nous allons étudier le cas F = E, donc on ne s’intéresse qu’aux endomorphismes f de E dans E.Les matrices sont donc toutes carrées. De plus les matrices de f seront toujours relatives à la même base « au départ »et « à l’arrivée ».Définition 14.6 Matrices semblables. Soit A et B deux matrices carrées de Mn K. On dit que B est semblableà A s’il existe une matrice inversible P GLn K telle queB = P1APRemarque 14.13. On remarque que les matrices semblables ne sont que des cas particuliers des matrices équivalentesoù Q = P.Propriété 14.14. La relation « est semblable à » sur MnK est une relation d’équivalence. On dit alors simplement« A et B sont semblables » plutôt que « B est semblable à A ».Démonstration. Réflexivité : Nous avons simplement A = I1n AIn.Symétrie : Nous avons B = P1AP, donc A = PBP1. En posant P′ = P1, on a bien A = P′1BP′.16014. Représentation matricielle des applications linéaires
Page 167 : AlgèbreCPI12019/2020Transitivité : Nous avons C = P1BP et B = P′1AP′. En injectant dans l’expression de C, on obtientC = P1 P′1AP′P = P1P′1AP′P = P′P1 AP′P. En posant P′′ = P′P nous obtenons C = P′′1AP′′.Exemple 14.5. In est la seule matrice semblable à In alors que toute matrice inversible est équivalente à In.Propriété 14.15. Si deux matrices A et B sont semblables alors elles sont équivalentes semblables ⇒équivalentes.Démonstration. Comme nous l’avons remarqué plus haut, il suffit de poser Q = P.□Remarque 14.14. Attention!! La réciproque est fausse. Comme indiqué dans l’exemple précédent, n’importe quellematrice inversible est équivalente à l’identité. Or seule l’identité est semblable à l’identité.Propriété 14.16 Matrices de passage et matrices semblables. Soit E un espace vectoriel de dimension finie, fune application linéaire de E dans E, B et B′ deux bases de E. On note :P = PBB′Soit A la matrice de f relativement à la base B et B la matrice de f relativement à la base B′. On a alors :B = P1APDémonstration. Nous avons vu que cette propriété n’est qu’un cas particulier de la propriété 14.11. Il suffit donc dereprendre la démonstration en supprimant simplement les indices sur les bases.□Remarque 14.15. Cette propriété nous dit que les matrices carrées d’une même application dans des bases différentessont des matrices semblables.Propriété 14.17. Soit A,B MnK. Alors A et B sont semblables si et seulement si A et B sont les deux matricesd’une même application linéaire dans deux bases différentes.Démonstration. On reprend là encore la démonstration de la propriété 14.12□Propriété 14.18 Invariance du déterminant et de la trace. Deux matrices carrées semblables ont le même dé-terminant et la même trace : Pour toute matrice carrée A et toute matrice carrée inversible P, on a :detP1AP= detAtrP1AP= trA14. Représentation matricielle des applications linéaires161
Page 168 : CPI12019/2020AlgèbreDémonstration.Déterminant : On sait que pour toute matrice carrée, detAB = detAdetB. De plus, puisque P est inversible,detP1=1detP.Trace : Nous allons utiliser la propriété 12.3 du chapitre « Matrices » : trAB = trBA.Ainsi, trP1AP= trP1AP= trAPP1= trAPP1= trA.Remarque 14.16. Attention! Cette fois, la réciproque est fausse : Deux matrices ayant même déterminant et mêmetrace ne sont pas forcément semblables.Remarque 14.17. Les traces de deux matrices semblables étant égales, la trace est invariante par changement de base.Cela nous permet de justifier la définition suivante.Définition 14.7 Trace d’un endomorphisme. Soit E ̸= 0E un K-espace vectoriel de dimension finie et f L E. On appelle trace de f et l’on note tr f la trace d’une matrice de f dans une base de E.Propriété 14.19 trace. Pour tout f,g L E,— Pour tout λ K, trλ f +g = λtr f+trg.— tr f ◦g = trg◦fDémonstration. Il suffit de revenir aux matrices et utiliser les propriétés précédentes.□Remarque 14.18. Alors qu’il est simple de montrer que deux matrices sont équivalentes en calculant leurs rangs, ilest plus difficile de montrer que deux matrices sont semblables.Exemple 14.6. Soit A =1223et B =111467. Montrer que A et B sont semblables et déterminertoutes les matrices P inversibles telles que B = P1AP.D’abord on vérifie qu’elles « peuvent » être semblables en calculent leur rang elles doivent être équivalentes,leur déterminant et leur trace :rgA = 2rgB = 2detA = 3+4 = 7detB = 77+84 = 7trA = 1+3 = 4trB = 117 = 4Nous n’avons pas prouvé qu’elles étaient semblables, mais il n’est pas impossible qu’elles le soient.Posons maintenant B = e1 ;e2 une base de R2. Notons f l’application telle que A soit la matrice de f dansla base B. Nous cherchons une base B′ε1 ;ε2 telle que B soit la matrice de f dans cette dernière base. Nouscherchons alors la matrice de passage P de B vers B′. Notons P =abcd.16214. Représentation matricielle des applications linéaires

Page 169 : AlgèbreCPI12019/2020Nous avonsfe1=e1+2e2fe2=2e1+3e2etε1=ae1+ce2ε2=be1+de2.Ainsi, fε1 = 11ε1 6ε2 = 11ae1 + ce2 6be1 + 2e2 = 11a 6be1 + 11c 6de2. Mais nous pouvonsaussi le calculer en utilisant la linéarité de f : fε1 = afe1 + c fe2 = ae1 + 2e2 + c2e1 + 3e2 = a 2ce1 +2a+3ce2.Puisque e1 ;e2 est une base, il y a unicité de la décomposition. Nous avons donc 11a6b = a2c et 11c6d =2a+3c. En raisonnant de même avec fε2, nous avons le système :11a6b=a2c11c6d=2a+3c14a7b=b2d14c7d=2b+3dJe vous ai détaillé le raisonnement pour que vous compreniez les mécanismes qui entrent en jeu. Mais en fait cesystème peut être trouvé de manière plus rapide et directe, il s’obtient en résolvant simplement l’équationPB = APLorsque l’une des matrices possède beaucoup de zéros, il est parfois plus simple de poser des équations du typefεi = kakek.Après résolution par pivot de Gauss par exemple nous trouvons :S =4c3d ;7c5d ;c;d / c;d R2Le système possède une infinité de solutions. Une seule suffit pour conclure que A et B sont semblables, àcondition que cela donne une matrice de passage inversible.On peut prendre c = 0 et d = 1 : P =3501avec detP = 3 ̸= 0 et P1 = 131503. Le calculde P1AP que je vous laisse le soin de faire donne bien B.L’énoncer nous demande toutes les matrices P inversibles. P est nécessairement de la forme :P =4c3d7c5dcdAvec c;d R2 tel que detP = d4c3dc7c5d = 3d2 +9cd 7c2 = 12814c9d2 +3d2̸= 0.Ce déterminant s’annule donc pour d = 0 et 14c = 9d, c’est-à-dire, c = d = 0. Donc c;d R2\0;0.14. Représentation matricielle des applications linéaires163

Page 170 :

Page 171 : Bibliographie1Patrick BERGEON. Cours de TSI. 2015. URL : http://patrick.bergeon.perso.neuf.fr/SupTSI/Cours.htm visité le 01/06/2015.2Christophe BERTAULT. Cours de MPSI. 2017. URL : http://christophebertault.fr visité le 21/08/2017.3Lycée CORBUSIER. Cours de TSI. 2015. URL : http://www.prepa-corbusier.fr visité le 01/06/2015.4Denis FELDMANN. Mathématiques dans le supérieur. 2015. URL : http://denisfeldmann.fr/maths.htmvisité le 01/06/2015.5Jean-Michel FERRARD. Cours de MPSI, PCSI et PSI. 2017. URL : http : //mathprepa.fr/ visité le21/08/2017.6Patrick FRADIN. Cours de MPSI. 2017. URL : http://mpsi.tuxfamily.org/ visité le 21/08/2017.7Laurent GARCIN. Cours de MPSI. 2017. URL : http://lgarcin.github.io visité le 21/08/2017.8Daniel GUININ, François AUBONNET et Bernard JOPPIN. Algèbre 1. Précis de Mathématiques - Cours, Exer-cices résolus 1. Breal, 1994. ISBN : 978-2-7495-1234-1.9Daniel GUININ, François AUBONNET et Bernard JOPPIN. Analyse 1. Précis de Mathématiques - Cours, Exer-cices résolus 3. Breal, 1994. ISBN : 978-2-7495-1234-1.10Daniel GUININ, Elisabeth LADAME et Hervé VANDEVEN. Tout-En-Un Mathématiques. Les nouveaux Précisde Mathématiques. Breal, 2014. ISBN : 978-2-7495-3230-1.11Éric LEHMAN. 2. analyse. Mathématiques pour l’étudiant de première année. Belin, 1986. ISBN : 978-2-7495-1234-1.12Emmanuel MORRAND. Cours de TSI. 2015. URL : http://www.emmanuelmorand.net/supTSI-1213/supTSI-1213.php visité le 01/06/2015.13Lycée Pierre-Paul RICQUET. Cours de TSI. 2015. URL : http://pedagogie.ac-toulouse.fr/lyc-riquet-saint-orens/TSI-Maths/1tsi/html/cours.php visité le 01/06/2015.14Jacques ROGNAUX. Cours de TSI. 2015. URL : http : //www.tsisoa.com/spip/Cours -de -Jacques -Rogniaux.html visité le 01/06/2015.15Jean-Paul VINCENT. Cours de MPSI. 2017. URL : http://tourbillon.pagesperso-orange.fr visité le21/08/2017.165
Page 172 :
Page 173 : IndexAAbsurde Raisonnement par . . . . . . . . . . . . . . . . . . . . . . . . . . 8Affixe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39Algorithme de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Algorithme de Gauss-Jordan . . . . . . . . . . . . . . . . . . . . . . . . 138Analyse-Synthèse Raisonnement par. . . . . . . . . . . . . . . . . .9Angle moitié Factorisation. . . . . . . . . . . . . . . . . . . . . . . . . .46Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31Application linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117Argument d’un nombre complexe.. . . . . . . . . . . . . . . . . . . .43AssociésPolynômes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Associative loi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Associativité. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77Automorphisme .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84, 117BBase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111Base incomplète Théorème de la . . . . . . . . . . . . . . . . . . . 113BijectionRéciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36bijection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35BorneInférieur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Supérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29CCaractérisationBase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Famille liée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Classe d’équivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Coefficient dominant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Combinaison linéaire d’une famille de vecteurs . . . . . .102Commutative loi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77Commutativité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Complémentaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Composition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32Condition nécessaire/suffisante . . . . . . . . . . . . . . . . . . . . . . . . 5Conjonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Conjugué. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40Contraposition Raisonnement par. . . . . . . . . . . . . . . . . . . . .8Coordonnées dans un espace vectoriel . . . . . . . . . . . . . . 112Cramer Formules de . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149DD’Alembert-Gauss Théorème de . . . . . . . . . . . . . . . . . . . . 62DérivéesD’un polynôme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56De Moivre Formule de . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Degré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Degré d’une fraction rationnelle . . . . . . . . . . . . . . . . . . . . . 66DéterminantFamille de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148Matrice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .142Différence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Différence symétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Dimension d’un espace vectoriel . . . . . . . . . . . . . . . . . . . . 113Disjonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Distributivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6, 22, 78Divisibilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Division Euclidienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58EÉlément neutre. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78Élement régulier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Endomorphisme .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84, 117Engendré sous-espace vectoriel . . . . . . . . . . . . . . . . . . . . 106Ensembles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17Borné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Complémentaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20Différence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Différence symétrique. . . . . . . . . . . . . . . . . . . . . . . . . . .21Disjoints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20Égalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Inclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Intersection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Majorés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Minorés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Ordonnés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Parties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18Parties Ensemble des . . . . . . . . . . . . . . . . . . . . . . . . . . 19Produit cartésien. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21Sous-Ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Totalement ordonnés . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Union . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19ÉquationLinéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Équivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Classe d’. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158Relation d’. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26Espace vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101de dimension finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112sous-espace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104engendré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106supplémentaires. . . . . . . . . . . . . . . . . . . . . . . . . . . . .108Euclidienne Division. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58Euler Formules de . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Exponentielle imaginaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . .42FFamille. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31Famille de vecteurs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102génératrice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109167
Page 174 : CPI12019/2020Algèbreliée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110libre. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110FonctionExponentielle complexe . . . . . . . . . . . . . . . . . . . . . . . . . 44FonctionsBijectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Caractéristique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Identité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Indicatrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Injectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Involutive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36surjectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Forme irréductible Fraction rationnelle . . . . . . . . . . . . . . . 65FormuleDe Leibniz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56Du binôme Matrices. . . . . . . . . . . . . . . . . . . . . . . . . .134Formule de Grassmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114Formules de Cramer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .149Fraction rationnelle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65GGénératrice Famille génératrice . . . . . . . . . . . . . . . . . . . . 109GaussAlgorithme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Gauss-Jordan Algorithme de. . . . . . . . . . . . . . . . . . . . . . .138Grassmann Formule de. . . . . . . . . . . . . . . . . . . . . . . . . . . .114Groupe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81Morphisme de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84Sous-groupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Symétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82HHomomorphisme.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84Homothéties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51IIdentité fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Image directe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Image réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Implication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Inconnue principale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Inconnue secondaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96InférieureBorne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Injection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Intersection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19InvarianceDéterminant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161Rang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160Trace. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161Inverse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Inverse d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136Involution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Isomorphisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84, 117Itérés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78, 122LLeibnizFormule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Libre Famille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110Liée Famille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110LoiAssociative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Commutative. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77Composition interne de . . . . . . . . . . . . . . . . . . . . . . . . 77Distributive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78MMajorant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11, 28Matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127Équivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158Application linéaire d’une . . . . . . . . . . . . . . . . . . . . 152Carrée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .127Diagonale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128Échelonnée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Famille de vecteurs d’une . . . . . . . . . . . . . . . . . . . . . 151Identité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128Nulle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .127Passage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .155Semblables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160Triangulaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .129Maximum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Mineure d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142Minimum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Minorant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11, 28Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Monôme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Morphisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84de groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84Multiplicité Ordre de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59Nn-uplet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Négation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Nilpotent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .122Noyau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Noyau d’une application linéaire . . . . . . . . . . . . . . . . . . . 118OOpération élémentaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89OrdreRelation d’. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Ordre de multiplicité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59PPôle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Partie entière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Partition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21Permutation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93Pivot de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Plus grand élément. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11, 28Plus petit élément . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11, 28Polynômes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Associés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Dérivé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56Irréductible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Scindé. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61168Index
Page 175 : AlgèbreCPI12019/2020Unité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Unitaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Produit cartésien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21prolongement d’une fonction . . . . . . . . . . . . . . . . . . . . . . . 32Proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3QQuantificateurs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6RRéciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Réciproque Image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Réciproque Logique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Régulier élément . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Racine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Carrée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47n-ième. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50de l’unité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49RaisonnementPar analyse-synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Par contraposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Par l’absurde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Par récurrence .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Rang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96, 124Famille de vecteurs d’une . . . . . . . . . . . . . . . . . . . . . 114Théorème du . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .124Relation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Antisymétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Binaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25d’ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27d’Équivalence .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Réflexive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Symétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Transitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Relations coefficients/Racines . . . . . . . . . . . . . . . . . . . . . . . . 63Restriction d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . 32Rotations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51SSomme de sous-espaces vectoriels . . . . . . . . . . . . . . . . . 107Somme directe de sous-espaces vectoriels. . . . . . . . . . .108Sous-espace vectoriel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104engendré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106supplémentaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108Sous-groupe .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82SupérieureBorne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Supplémentaires sous-espaces supplémentaires . . . . . . 108Surjection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Symétries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Symétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79SystèmesCompatible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Équivalents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89, 90Incompatible .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87TTable de vérité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Taylor Formule de . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57ThéorèmeBase incomplète. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113Fondamental de l’algèbre. . . . . . . . . . . . . . . . . . . . . . . .62Rang du. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .124TotalOrdre. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28Translations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Trigonométrie Formulaire .. . . . . . . . . . . . . . . . . . . . . . . . . 46UU Ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40Union . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19VVecteursColonne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127Ligne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127ZZéro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Index169
Page 176 :

Page 177 : Table des matièresI.S111.Logique et raisonnement31.1.Rudiments de logique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31.1.1.Première définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31.1.2.Opérations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41.1.3.Tables de vérité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61.1.4.Quantificateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61.1.5.Négations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71.2.Différents types de raisonnements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81.2.1.Raisonnement par contraposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81.2.2.Raisonnement par l’absurde. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81.2.3.Raisonnement par analyse-synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91.3.Propriétés de N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111.3.1.Définitions générales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111.3.2.Parties de N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111.3.3.Raisonnement par récurrence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .122.Ensembles172.1.Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .172.2.Opérations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .192.3.Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213.Relations binaires253.1.Vocabulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .253.2.Relations d’équivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .263.3.Relations d’ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .274.Applications314.1.Fondamentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314.2.Composition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .324.3.Fonction indicatrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.4.Image directe et réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .344.5.Injections, Surjections, Bijections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .355.Nombres complexes395.1.Rappels de Terminale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .395.2.Exponentielle complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .405.2.1.Groupe U des nombres complexes de module 1 . . . . . . . . . . . . . . . . . . . . . . . . .405.2.2.Exponentielle imaginaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .415.2.3.Argument d’un nombre complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .425.2.4.Exponentielle complexe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .445.3.Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .455.3.1.Trigonométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .455.3.2.Équations du second degré dans C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .475.3.3.Racines n-ièmes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49171
Page 178 : CPI12019/2020Algèbre5.3.4.Géométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .505.3.4.1.Translations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .505.3.4.2.Symétries centrales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .515.3.4.3.Symétries Axiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .515.3.4.4.Homothéties et Rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .515.3.4.5.Cas général. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .526.Polynômes536.1.Polynômes à une indéterminée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .536.1.1.Définitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .536.1.2.Degré d’un polynôme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .546.2.Dérivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .566.2.1.Polynôme dérivé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .566.2.2.Dérivées d’ordre supérieur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .566.3.Arithmétique dans KX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .576.3.1.Divisibilité. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .576.3.2.Division euclidienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .586.4.Racines d’un polynôme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .596.4.1.Racines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .596.4.2.Nombre de racines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .606.5.Décomposition en facteurs irréductibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .616.5.1.Polynôme irréductible. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .616.5.2.Décomposition dans CX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .626.5.3.Décomposition dans RX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .636.6.Somme et produit des racines d’un polynôme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .637.Fractions Rationnelles657.1.Ensemble des fractions rationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .657.1.1.Fractions rationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .657.1.2.Opérations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .657.1.3.Dérivées. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .667.1.4.Degré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .667.1.5.Zéros et pôles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .677.2.Décomposition en éléments simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .687.2.1.Théorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .687.2.2.Pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.Éléments simples de première espèce . . . . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.1.Pôle simple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.1.1.Multiplication-évaluation . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.1.2.Dérivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.2.Pôles doubles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .697.2.2.1.2.1.Premier coefficient. . . . . . . . . . . . . . . . . . . . . . . . .707.2.2.1.2.2.Second coefficient . . . . . . . . . . . . . . . . . . . . . . . . . .707.2.2.1.2.2.1.Soustraction. . . . . . . . . . . . . . . . . . . . . . .707.2.2.1.2.2.2.Dérivation . . . . . . . . . . . . . . . . . . . . . . . . .707.2.2.1.3.Pôles d’ordre supérieur ou égal à 3 . . . . . . . . . . . . . . . . . . . . .707.2.2.1.3.1.Premier coefficient. . . . . . . . . . . . . . . . . . . . . . . . .707.2.2.1.3.2.Division selon les puissances croissantes . . . . . . . . . . . . . .717.2.2.2.Éléments simples de seconde espèce. . . . . . . . . . . . . . . . . . . . . . . . .727.2.2.2.1.Passage dans C pour les pôles simples . . . . . . . . . . . . . . . . . .727.2.2.2.2.Multiplication-évaluation dans C . . . . . . . . . . . . . . . . . . . . . .727.2.2.3.Autres méthodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .737.2.2.3.1.Méthode de la limite. . . . . . . . . . . . . . . . . . . . . . . . . . . .737.2.2.3.2.Évaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73172Table des matières
Page 179 : AlgèbreCPI12019/20207.2.2.3.3.Parité/imparité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73II.S2758.Groupes778.1.Lois de composition interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .778.1.1.Définitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .778.1.2.Éléments particuliers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .788.2.Groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .818.2.1.Groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .818.2.2.Sous-groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .828.3.Morphismes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .848.3.1.Définitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .848.3.2.Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .848.3.3.Noyau et image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .859.Systèmes linéaires879.1.Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .879.2.Systèmes équivalents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .899.3.Algorithme de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .919.4.Résolution d’un système linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9510. Espaces vectoriels10110.1. Espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10110.1.1. Espaces vectoriels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10110.1.2. Produit d’une famille finie d’espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . 10310.1.3. Sous-espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10310.1.4. Somme de sous-espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10710.2. Familles de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10910.2.1. Familles génératrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10910.2.2. Familles liées, familles libres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11010.2.3. Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11110.3. Espaces vectoriels de dimension finie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11210.3.1. Dimension d’un espace vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11210.3.2. Dimension d’un sous-espace vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11410.3.3. Sous-espace vectoriels supplémentaires en dimension finie . . . . . . . . . . . . . . . . . . . 11511. Applications linéaires11711.1. Définitions et propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11711.2. Image, Noyau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11811.3. Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12011.3.1. L E ;F . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12011.3.2. L E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12111.3.3. AutE et GLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12211.4. Applications linéaires en dimension finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12311.4.1. Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12311.4.2. Rang. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12412. Matrices12712.1. Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12712.1.1. Types de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12712.1.2. Opérations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13012.2. Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Table des matières173
Page 180 : CPI12019/2020Algèbre12.3. Matrices inversibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13512.3.1. Théorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13512.3.2. Pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13813. Déterminants14113.1. Déterminant d’une matrice carré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14213.1.1. Définitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14213.1.2. Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14313.1.3. Calculs pratiques de déterminant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14513.2. Déterminant d’une famille de vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14813.3. Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14913.3.1. Géométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14913.3.2. Résolution de systèmes linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14914. Représentation matricielle des applications linéaires15114.1. Matrice d’une application linéaire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15114.1.1. Matrice d’une famille finie de vecteurs dans une base finie . . . . . . . . . . . . . . . . . . . 15114.1.2. Matrice d’une application linéaire dans des bases . . . . . . . . . . . . . . . . . . . . . . . . 15214.1.3. Liens entre applications linéaires et matrices. . . . . . . . . . . . . . . . . . . . . . . . . . 15414.2. Changements de bases, équivalence et similitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . 15514.2.1. Matrices de passage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15514.2.1.1. Définition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15514.2.1.2. Propriétés. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15614.2.2. Matrices équivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15814.2.3. Matrices semblables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160174Table des matières
Pages : 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180